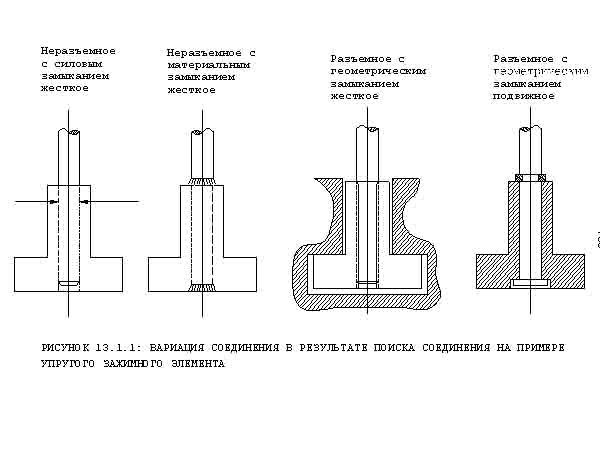
"Метод конструирования машин, приборов и аппаратов"Р. Коллер1976"Введение, представление о методе. Синтез функций" 13. Специальные правила проектированияПод этим заглавием должны обобщаться специальные правила для часто встречающихся отдельных задач конструирования. При конструировании технических систем, пусть даже весьма различных, еще существует некоторые отдельные задачи, которые в малодифференцированном виде приходится постоянно решать почти в каждой системе. Так, например, при любом конструировании технических устройств элементы конструкций, узлы и т.д. необходимо каким-либо образом соединять друг с другом: далее, при разработке машин и приборов в большинстве случаев приходится создавать какие-нибудь подвижные системы (передачи и др.). Поэтому кажется целесообразно в дальнейшем еще раз подробнее, остановиться на этих часто встречающихся задачах (основных задачах) конструирования. 13.1. Поиск соединенияМашины, приборы и аппараты, как уже упоминалось, состоят из множества деталей и узлов, которые каким-то образом связаны друг с другом. Поэтому "соединение двух элементов" - очень часто встречающаяся задача конструирования. Соединения элементов могут характеризоваться и отличаться следующими тремя признаками: - быть жесткими или подвижными; - быть разъемными или неразъемными; - быть с силовым замыканием, с геометрическим замыканием или с материальным замыканием. Эти отличительные признаки можно рассматривать как переменные для альтернативного конструирования соединений. Названные отличительные признаки соединения формально можно рассматривать как независимые друг от друга. Сообразно с этим, для соединения двух элементов всего получается 2*2*3=12 комбинаций признаков. Каждая из них может использоваться в виде описания свойств одного соединения. Некоторые комбинации не поддаются реализации, как, например, с материальным замыканием и разъемные. Может производиться дальнейшая градация подвижных соединений (сочленений) в соответствии со степенью свободы сочленения. Жестким соединениям соответствуют сочленения со степенью свободы n=0, подвижные соединения (сочленения) могут иметь степени свободы от n=1 до n=5. Должно ли быть соединение между двумя элементами разъемного или неразъёмным, с силовым замыканием, с геометрическим замыканием или с материальным замыканием, жестким или подвижным, в конкретном случае может настоятельно предписываться или выбираться произвольно. В случаях, когда свойства соединения выбраны свободно, для систематической вариации соединений можно использовать названные критерии. Для изменения формы соединений для этих случаев следует Правило 11: Поиск соединения представляет собой операцию, которая служит для того, чтобы в результате варьирования отличительных признаков (критериев) соединения отыскать изменения формы. Соединение может отвечать следующим критериям: разъёмное или неразъемное, с силовым замыканием, с геометрическим замыканием или с материальным замыканием, жесткое или подвижное. Для пояснения сказанного на рисунке 13.I.I. показано несколько вариантов соединений болта с сухарем для Т-образных пазов, разработанных согласно этим критериям. На практике, по причине определенных недостатков, в конкретных случаях эксплуатации, определенные варианты, естественно, бы не применили. Как показывает этот пример, изменение формы может производиться без изменения в результате этой собственной функции соединения. 13.2. Поиск формы движенияКак уже излагалось, детали или узлы технической системы связаны между собой или жестко, или подвижно. Соединения, в которых две подсистемы движутся относительно одна другой, в отношении формы движения подразделяются на соединения - с поступательным движением, - с вращательным движением, - с универсальным движением. Эти признаки являются основной для разработки правил конструирования по систематическому изменению формы движения подвижных соединений.Для систем, в которых не существует зависимости от формы относительного движения элементов конструкции, а, например, существует, зависимость только от соблюдения определенных, заданных соответствий положения, можно выявить несколько решений в результате использования следующего правила конструирования: Правило 12: В результате поиска формы движения для подвижных соединений двух подсистем можно отыскать различные варианты форм. Движение может быть вращательным, поступательным или универсальным. Примерами изменения формы движения являются двери с вращательным, поступательным или универсальным движением, как, например, вращающиеся двери, раздвижные двери или двери с шарнирными механизмами; последние иногда встречаются в трамваях, гоночных автомобилях или в других транспортных средствах. Для включения электрических контактов форма движения, точно так же, не имеет значения. Названные формы движения, как можно мысленно дополнить картину, приводят к известному поворотному выключателю (вращение), кнопочному включателю (поступательное движение), или к выключателю, приводимому в действие шарнирным механизмом.
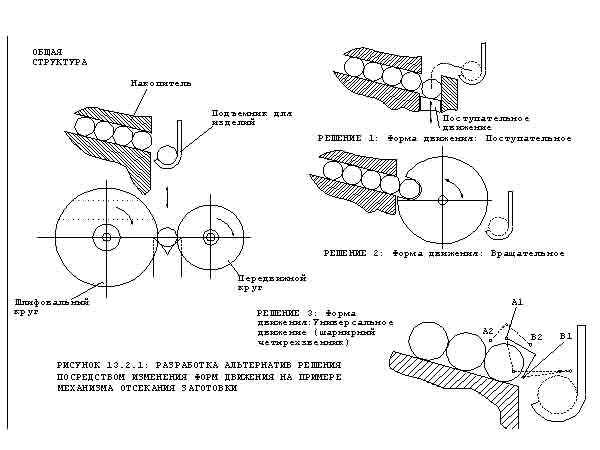
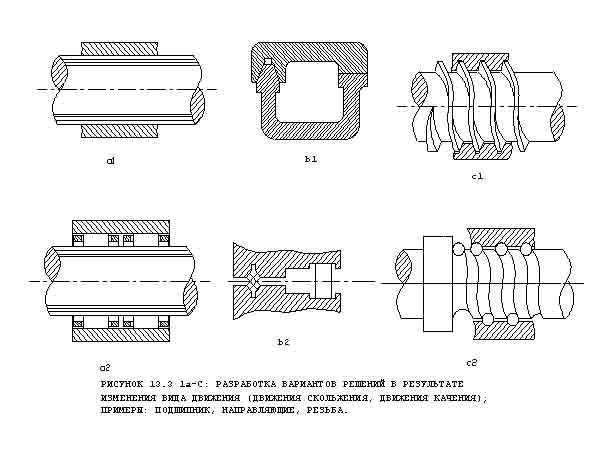
Для разделения изделий цилиндрической формы, на рис. 13.2.1. показаны три различных технических решения передач, которые оказалось возможным отыскать в результате изменений формы движения. Задача заключалась в том, чтобы изделия цилиндрической формы, находящиеся в накопителе, по отдельности подвести к подъемнику для деталей или к месту обработки. Для детализации этих изделий на отдельных рисунках a, b, c показано, соответственно техническое решение передач с поступательной, вращательной и универсальной формой движения элемента передачи. 13.3. Поиск вида движенияПодвижное соединение отдельных систем может, в принципе, конструироваться как направляющая скольжения или как направляющая качения. В каждом случае отдельные системы можно непосредственно или с использованием третьей отдельной системы (плавающие вкладыши подшипников или тела качения) заставить скользить в промежуточном положении или перекатываться. Наконец, движение двух отдельных систем может быть еще также отчасти скользящим или отчасти катящимся (комбинированная направляющая); зубчатое зацепление или кулачковая передача могут служить примерами систем в которых встречается вид движения "Скольжение с качением". Примерами свободного скольжения или свободного качения могут считаться подшипники скольжения, направляющие скольжения, а также подшипники качения и направляющие качения. На рисунке 13.3.1 показаны еще другие примеры изменения вида движения. Если вид движения является несущественным для движения двух отдельных систем, то для изменения формы подвижных соёдинений можно использовать следующую дальнейшую возможность: Правило 13: В результате поиска вида движения для подвижного соединения двух отдельных систем можно отыскать различные варианты форм. Вид движения может быть скользящим, катящимся или комбиниpoвaнным (то есть скользящим и катящимся). 13.4. Поиск физического принципа, вида передачи или конструкции передачи для разработки систем движенияРазработка систем движения - очень часто встречающаяся отдельная задача при конструировании машин и приборов. В общем, для реализации определенной функции движения существуют не только передачи, a тaк жe системы движения, которые основываются на других физических принципах, чем передачи.
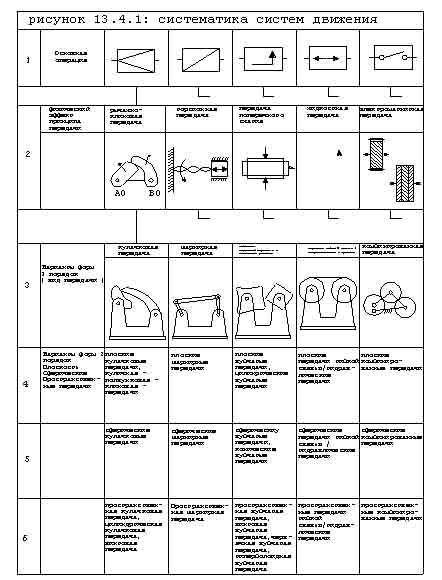
Для отыскания решения, самого оптимального для конкретной задачи, или для разработки, по возможности, непрерывного каталога для систем движения определяется значение всех существующих принципов движения, условием которых являются различные конструктивные разновидности. Поэтому было бы полезно иметь алгоритмы для систематической разработки всех возможных систем движения. Исходным моментом и основой для разработки такого метода (алгоритма) является научный вывод относительно того, что системы движения всегда основываются на физических явлениях, которые движение или количество движения (путь, скорость и. т.д.) или величины энергии (сила, момент) могут передавать, уменьшать или увеличивать, а также в состоянии изменять их в их направлении, так как сила, путь, скорость и другие величины являются векторами - (передачи и другие системы движения), или могут превращать энергию какого-либо вида в энергию движения (системы или двигатели, создание движения). Названная в последнюю очередь группа систем, создающих движение, не должна здесь рассматриваться в дальнейшем. Для первой группы систем движения можно сделать вывод, что для разработки этих систем подходят все те физические явления (эффекты), которые проводят (передают) силу или момент, или количество движения, могут их увеличивать или уменьшать и/или изменять в их направлении. Эффекты, которые имеют названные свойства, можно формально привести из соответствующих систематик основных операций "Увеличение", "|Изменение направления" и "Проводимость". Эффекты для увеличения или уменьшения движения, применяемые периодически, чаще всего это эффекты рычага и клина. (Как можно показать теоретически, эффекты рычага и клина позволяют осуществлять трансформацию друг в друга. Рычажная передача, показанная на рисунке 1З.4.1. строка 2, столбец 3, определяется как принципиальное или основное решение эффекта рычага. Если мысленно центр вращения рычага с основанием перемещать до бесконечности, то это звено может производить только поступательное движение; первоначальная передача с одним ведущим и одним вращающимся ведомым звеном переходит в клиновой механизм с поступательным ведомым звеном.) Далее, для реализации вышеназванных основных операций пригодны также эффекты кручения и поперечного сжатия, эффект постоянства давления в жидкостях, а также электрические и магнитные эффекты. На рисунке 13.4.1, строка 2, показаны следующие из ниx принципы для соответствующих систем движения. Эффект рычага или клина является основой всех известных передач только с жесткими элементами, как, например, кулачковые передачи, шарнирные передачи, зубчатые и передачи гибкой связью (и другие). Эффект кручения приводит к передачам с одним или несколькими упругими звеньями; этот принцип применяется для увеличения малых движений в так называемом микрокаторе, в приборе для механического измерения предельно малых изменений длины (1/1000 мм). Как изображено на рисунке 13.4.1. использование поперечного сжатия упругих тел при нагрузке на растяжение или при нагрузке на сжатие для кинематических целей, до сих пор не известно. Эта возможность включается здесь для пояснения и дополнения систематического принципа. На эффекте постоянства давления в газах и жидкостях (статический случай) основываются все так называемые гидростатические передачи, которые наряду с жесткими элементами используют также гидравлические или пневматические элементы. Возможность создания и переноса сил с помощью электрических и магнитных полей ведет, наконец, к системам движения с магнитными или электрическими элементами. Более важное значение для технических устройств ранее имели значение лишь эффект рычага и клина и эффект постоянства давления в жидкостях, все остальные эффекты применяются лишь в отдельных случаях (микрокатор), или вообще не применяются. Исходя из принципиального решения эффекта рычага (рисунок 1З.4.1) при использовании правил конструирования и проектирования можно вывести следующие известные виды передач: кулачковые, шарнирные, передачи с катящимся рычагом, или зубчатые передачи и передачи гибкой связью, или гидравлические передачи (рисунок 1З.4.1; стpoка 3). Кулачковая передача соответствует самому общему виду рычажной системы и тип передачи характеризуется одновременным качением и скольжением в точке контакта (сочленения) двух рычагов или кулачков. При этом качественном способе рассмотрения винтовые передачи следует рассматривать как особую конструктивную разновидность общей кулачковой передачи. То условие, что в точке контакта двух рычажных элементов должно возникать только качение (а не скольжение), дает важную особенность для конструирования передач с катящимся рычагом. Зубчатыми передачами обычно называются особые передачи с катящимся рычагом, имеющие неразъемные профили кулачков. Шарнирные передачи (которые также называются сопряженными или кривошипными передачами) характеризуются тем, что отдельные рычаги посредством шарниров соединены таким образом, что смежные звенья могут двигаться по отношению друг к другу только по круговым направляющим. Наконец, передачи гибкой связью можно представить себе возникшими из зубчатых передач в результате того, что пустотелая шестерня зубчатой передачи, соответствующая гибкой связи, является упруго-гибкой. При этом качественном способе рассмотрения гидравлические передачи, за исключением характера способа нагрузки, идентичны передачам с гибкой связью. Независимо от функции движения, которую должна осуществлять передача, на вид передачи, далее, еще весьма заметно может влиять положение осей передачи. Положение осей каждого вида передачи, изображенной на рисунке 13.4.1, строка 3, может устанавливаться таким образом, что все оси являются параллельными, пересекаются в одной точке или имеют по отношению друг к другу общее пространственное положение. Варианты форм передач, соответствующие этим положениям осей, характеризуются как плоские, сферические или пространственные передачи (рисунок 13.4.1, строка 4).
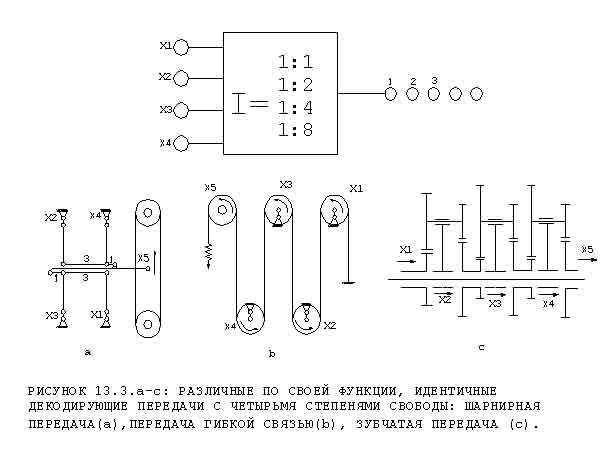
Обобщая изложенное, можно отметить следующее: системы движения могут основываться на различных принципах или физических эффектах. Форма систем движения в значительной степени может варьироваться положением осей (плоские, сферические, пространственные). В рычажных системах, в зависимости от назначения, можно проводить различие между кулачковыми передачами, шарнирными, передачами с катящимся рычагом, зубчатыми, передачами гибкой связью, гидравлическими передачами и между комбинациями названных типов (комбинированные передачи). Согласно предшествующим высказываниям, для качественного синтеза движения вытекает: Правило 14: Для задачи движения, в общем, всегда существует несколько решений, то есть несколько принципиальных вариантов, вариантов систем или вариантов конструкций. Выбор принципа передачи, конструкции или вида передачи представляет собой операцию, которая служит для того, чтобы отыскать варианты черновых набросков для систем движения. Для пояснения сказанного на рисунках 13.4.2 и 13.4.3 показано несколько примеров из практики. На рисунке 13.4.2 изображено несколько вариантов черновых набросков передач для открывания и закрывания окон легковых автомобилей, в основе которых лежало использование правила "Изменение вида передачи"(кулачковая передача (a), шарнирная передача (b), зубчатая передача (c), передача гибкой связью (d), гидравлическая передача (e). Винтовая передача (f) при этом способе рассмотрения считается особой пространственной кулачковой передачей, которую можно вывести путем изменения положения осей из кулачковой передачи (a) с параллельными осями. В соответствии с систематикой, согласно рисунку 13.4.1, подобные варианты называются вариантами форм второго порядка (замена плоских на пространственные передачи). Далее, в качестве следующего примера изменения вида передачи (шарнирная передача (a), передача гибкой связью (b) и зубчатая передача (c), на рисунке 13.4.3 показаны три cyммирующих передачи для декодирования двоичных сигналов. Декодирующие передачи часто применяются в информационных телетайпах.
13.5. Пример. Нажимное устройствоПусть ставится задача сконструировать нажимное устройство, которое преобразует вращение вала, приводимого в действие вручную, в поступательное нажимное движение. Для создания относительно большого усилия нажима движение ведомого звена по сравнению с движением приводного механизма следует сильно уменьшить (редуцировать). На основании пространственных данных входной вал должен располагаться в горизонтальной плоскости. Впоследствии ведомое звено должно функционировать в вертикальном направлении (рисунок 13.5.1 вверху). Отсюда вытекает следующее отвлеченное правило: вращательное движение горизонтально расположенного вала необходимо преобразовать в поступательное движение; его следует уменьшить и таким образом изменить в его направление, чтобы, наконец, возникло вертикальное нажимное движение. На рисунке 13.5.I а показана одна структура из нескольких возможных структур основных операций. Поскольку для этого случая может быть выбрана любая последовательность отдельных операций, то в результате систематической замены последовательности трех основных операций "Превращение", "Уменьшение", "Изменение направления" всего получают шесть структур основных операций. Для показа возможных черновых набросков целесообразно разрабатывать систематику комбинаций с отдельными решениями основных операций (рисунок 13.5.2). В столбцах этой систематики для превращения, уменьшения и изменения направления, соответственно, указаны варианты решений, которые были найдены в результате изменения вида передачи (столбцы 1-4) и принципа передачи (столбец 5). B первой строке, соответственно, находятся передачи различного типа для преобразования вращательного движения в поступательное. (Поскольку при этой операции измерение количеств движения изменяется (путь -> угол; скорость -> угловая скорость и т.д.), то эта операция, согласно определению (раздел 7.3)", называется преобразованием). Во второй строке показаны различные типы передач для уменьшения количества движения. В третьей строке показаны передачи для изменения направления пути, скорости или силы.
Ввиду своего большого практического значения в первый столбец наряду с широко известной кулачковой передачей с ведомым звеном в виде ползуна включены также еще винтовая и клиновая передачи; обе передачи рассматриваются, как варианты форм второго порядка общей кулачковой передачи. Стрелки на входе и выходе отдельных передач должны снова условно изображать осуществляемую операцию. Еще раз следует особо отметить, что кулачковая передача с ведомым звеном в виде ползуна (I столбец) может как преобразовывать; одну форму движения в другую (I строка), уменьшать количества движений (2 строка), так и изменять направление движения (3 строка). Теперь с помощью комбинационной систематики можно легко указать решения для общего чернового наброска. Они возникают путём сочетания, соответственно по одному варианту решения каждой строки, то есть каждой указанной операции в одну общую систему. Если при этом для операций преобразование и уменьшение выбирают, соответственно, винтовую передачу (столбец 1, строка 1 или столбец 1, строка 2), а для изменения направления клиновую передачу (столбец 1, строка 3), то получают принципиальное решение, как оно показано на рисунке 1З.5.1. А. Особенно простое решение получают в том случае, если для всех трех операций выбирается кулачковая передача с ведомым звеном в виде ползуна. Соответствующее решение показано на рисунке 13.5.1 В. Наконец, в случае решения С для преобразования формы движения и для уменьшения движения выбиралась винтовая передача, а для изменения направления движения жидкостная передача (Наряду с изменением направления эта передача еще также имеет свойство уменьшать движение.)(столбец 5, строка 3).
Рис.13.5.2 Чисто формально каждый вариант решения строки 1 на рисунке 13.5.2, соответственно, в сочетании с одним вариантом из строк 2 и 3 дает общий черновой набросок передачи, отвечающий постановке задачи. Теоретически при использовании всех комбинационных возможностей всего получается 6 в третьей степени = 216 вариантов черновых набросков. На практике, непосредственно за этим синтезирующим шагом следует производить процесс выбора, целью которого является указание варианта чернового наброска, самого оптимального для данного случая. Поскольку в данном конкретном случае применения среди других факторов особенно важной являлась малая высота конструкции, то решение, согласно рисунку 13.5.1. А, оказалось для этого наиболее подходящим.
...продолжение следует |
|
|