|
Размещено на сайте 22.11.2007.
ПРЕДИСЛОВИЕ КАФЕДРЫ ПРОГНОЗОВ
Добрый день уважаемые читатели!
Программа «патентного пейнтбола», с которой вы познакомились в предшествующих трёх выпусках,
http://www.metodolog.ru/01213/01213.html
(«Пример про то, как прогнозисту не «поверили»» Ю. Даниловский)
http://www.metodolog.ru/01218/01218.html
(Патентный пейнтбол. Робот - шнекоход (часть1)А.Матюшенко)
http://www.metodolog.ru/01223/01223.html
(Патентный пейнтбол. Робот - шнекоход. (часть 2) А.Матюшенко)
продолжается в сегодняшнем выпуске рубрики.
Нужно сказать, что редакция рубрики работает с большой нагрузкой по этой программе, потому что желающих принять участие в эксперименте оказалось не так мало. Каждый, кто находит в себе мужество «поставить на кон свою репутацию «солвера» (от английского solve - решать) пытается показать свою методологию получения прогнозных решений и тем самым подвергнуть её самому бескомпромиссному испытанию на «адекватность».
Ведь если через год-полтора какая-то компания произведёт робот-пылесос, родившийся на страницах нашей рубрики, это будет означать, что «Решатель Такой То» - успешен и методология его – хороша.
Я напомню, что смысл этого эксперимента в том, чтобы любой решатель мог продемонстрировать публично свои навыки «решательства» на конкретном реальном проекте, который делается в режиме on line всем сообществом профессиональных ТРИЗ-экспертов, способных на такой риск.
В этой программе возникла даже некоторая «проблема участников», обусловленная тем, что некоторым авторам не хотелось бы, чтобы их работодатель знал о том, что «некто Х» участвует в этом проекте. Это связано, прежде всего, с соображениями «лояльности работника» по отношению к компании. Если ты в состоянии делать где-то публично (и бесплатно) какой-то проект вне компании, значит ты - «не догружен» и это неминуемо может сказаться на твоём evaluation, т.е. на результатах аттестации при определении твоих возможных премий.
Эту проблему мы благополучно решили введением возможности выступить «в маске», т.е. под вымышленным именем. Гладиаторы иногда выступали в масках. У них были свои причины, у нас - свои. «Редакторскую тайну» мы хранить умеем не хуже «государственной», поэтому риски потерять работу сведены к нулю, а вероятность получить новую работу в другом месте возрастает. Я всегда смогу подтвердить новому работодателю «кто есть, кто на самом деле» (разумеется, только по специальному запросу автора).
Автор, которого я представляю сегодня, выступает, «без маски». Материал, его исследования - велик, поэтому я традиционно разделяю его на две части и по традиции, которую мы на ваших глазах формируем, после авторского текста последует «ПОСЛЕСЛОВИЕ КАФЕДРЫ ПРОГНОЗОВ».
Подход, который продемонстрировал ТРИЗ-эксперт 4ого уровня (сертификат МАТРИЗ № 41) Валерий Павлов мне очень импонирует. Можно было бы использовать в качестве эпиграфа к исследованию текст, который мне любезно прислал сегодня мой хороший товарищ Мастер ТРИЗ Владимир Петров.
«…По бокам космического корабля "Колумбия" размещаются два двигателя по 5 футов шириной. Конструкторы корабля хотели бы сделать эти двигатели еще шире, но не смогли. Почему?
Дело в том, что двигатели эти доставлялись по железной дороге, которая
проходит по узкому туннелю. Расстояние между рельсами стандартное: 4 фута
8.5 дюйма, поэтому конструкторы могли сделать двигатели только шириной 5
футов.
Возникает вопрос: почему расстояние между рельсами 4 фута 8.5 дюйма? Откуда взялась эта цифра?
Оказывается, что железную дорогу в Штатах делали такую же, как и в Англии, а в Англии делали железнодорожные вагоны по тому же принципу, что и
трамвайные, а первые трамваи производились в Англии по образу и подобию
конки. А длина оси конки составляла как раз 4 фута 8.5 дюйма! Но почему?
Потому что конки делали с тем расчетом, чтобы их оси попадали в колеи на
английских дорогах, чтобы колеса меньше изнашивались, а расстояние между
колеями в Англии как раз 4 фута 8.5 дюйма! Отчего так?
Да просто дороги в Великобритании стали делать римляне, подводя их под
размер своих боевых колесниц, и длина оси стандартной римской колесницы
равнялась... правильно, 4 футам 8.5 дюймам! Ну вот теперь мы докопались,
откуда взялся этот размер, но все же почему римлянам вздумалось делать свои
колесницы с осями именно такой длины? А вот почему: в такую колесницу
запрягали обычно двух лошадей. А 4 фута 8.5 дюйма - это был как раз размер
двух лошадиных задниц! Делать ось колесницы длиннее было неудобно, так как это нарушало бы равновесие колесницы.
Следовательно, вот и ответ на самый первый вопрос: даже теперь, когда
человек вышел в космос, его наивысшие технические достижения напрямую
зависят от РАЗМЕРА ЛОШАДИНОЙ ЗАДНИЦЫ ДВЕ ТЫСЯЧИ ЛЕТ НАЗАД.»
http://www.livejournal.com/users/sergelin/559806.html
Tак и не знаю, кто истинный автор этой замечательной миниатюры.
Приятного чтения,
С уважением, Ведущий рубрики КП,
Юрий Даниловский yurydanilovsky@yandex.ru
ВЫГОДНЕЙ НАЙТИ БЕСКОНКУРЕНТНУЮ НИШУ, ЧЕМ ОБХОДИТЬ ПАТЕНТ КОНКУРЕНТА (ЧАСТЬ 1)

ВВЕДЕНИЕ
В этой статье дается прогноз дальнейшего развития роботов-пылесосов. Описаны возможные бесконкурентные ниши. Дано обоснование, почему поиск бесконкурентных ниш более выгоден, чем обход патентов.
ПРОГНОЗ РАЗВИТИЯ РОБОТОВ-ПЫЛЕСОСОВ ОТ ПРОИЗВОДИТЕЛЯ
Делались ли прогнозы развития роботов-пылесосов до настоящего времени, или никто не решался на такую дерзость? Конечно, прогнозы есть! Развитию роботов- пылесосов посвящены не только страницы в Интернете, но и конференции.
В этом 2007 году, на конференции в Бостоне, президент компании с говорящим названием "Robotic Trends" утверждает, что рынок роботов огромен, но невозможно определить его объем, так как он очень молод и фрагментарен
(http://findarticles.com/p/articles/mi_m5072/is_23_29/ai_n19296009).
Рост рынка роботов (см. Рисунок 1) впечатляет (http://www.robonexus.com/roboticsmarket.htm). Однако странно, что множество фирм выпускает множество моделей роботов- близняшек. Все соревнуются по принципу: «кто вперед успеет», в надежде не упустить свой крохотный сегмент. "Если посмотреть на ассортимент интересующих нас роботов-пылесосов, то можно заметить, что этот рынок уже переполнен, несмотря на молодость."
Компании вынуждены искать для своей продукции новое применение.
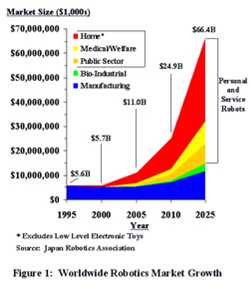
Рисунок 1. Предсказан быстрый рост рынка роботов.
Прогноз (http://www.roombareview.com/headlines/) компании iRobot - лидера производителей роботов-пылесосов нагляден, но краткосрочен и очень ограничен в деталях (см. Рисунок 2). Можно увидеть, что компания собирается выпустить свою версию техники конкурентов: газонокосилки и подводный пылесос (см. Рисунок 3). Лидер по роботам-пылесосам надеется не упустить свой крохотный сегмент в близких маркетинговых нишах. Легче и безопасней убедить руководство и инвесторов вторгнуться на проверенный рынок с конкурентами, чем повторить успех первопроходца - Roomba.
Меня, как «читателя» не устраивает загадочность обозначенных на схеме серым цветом роботов нового применения (New Application). Хотелось бы внести большую ясность.
Новые устройства показаны со знаком вопроса. Если производитель не может показать ближайшие будущие модели, то мы тем более не можем их увидеть из показанной линии развития.
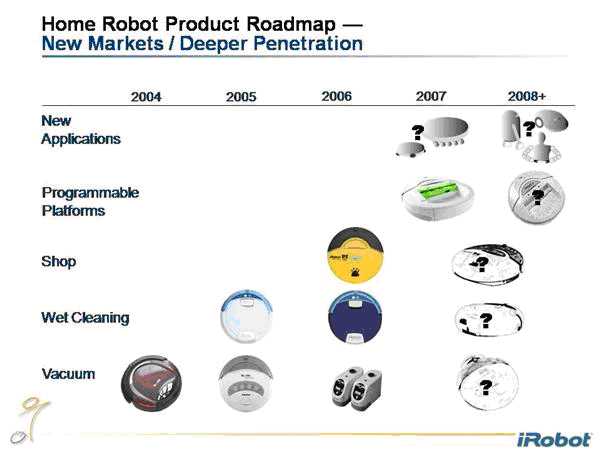
Рисунок 2. iRobot делится производственными планами выпустить 2 вида роботов в 2007.

Рисунок 3. Компания iRobot хотела бы видеть своих роботов всюду в доме и рядом.
ОТКУДА ПЫЛЬ БЕРЕТСЯ?
Не лишним будет посмотреть в надсистему и определить "Откуда пыль берется?".
Титов В.В. определил главную полезную функцию пылесоса, как "убирать пыль" (http://www.metodolog.ru/00050/00050.html#4.1). И добавляет: "т.е. обеспечивать чистоту в помещении". Трудно не согласиться.
Если проанализировать, откуда пыль берется, то мы найдем не так уж много путей поступления пыли в помещение. И, соответственно, не много способов воспрепятствовать проникновению пыли.
Вот эти пути проникновения пыли:
- внесение пыли воздухом во время проветривания,
- внесение пыли на обуви и одежде,
- внесение пыли на лапах и шерсти животных,
- внесение пыли вместе с покупками,
- создание пыли и мусора во время сверления стен и обработки древесины,
- отходы жизнедеятельности людей, птиц и животных в виде отшелушенной кожи, выпавших волос и перьев.
По моим ощущениям, больше всего пыли заносится во время проветривания квартиры. Я исхожу из своего опыта: пыль заметно покрывает пол квартиры после двух часового проветривания квартиры на 8 этаже у проспекта в городе Санкт-Петербурге. После проветривания возникает необходимость вымыть пол (см. Рисунок 4).
По запыленности с проветриванием может конкурировать только работа по дому. Сверление стен создает слишком много пыли и хорошо, что это происходит не часто.

Рисунок 4. Во время проветривания квартиры воздух вносит пыль в квартиру с улицы и разносит пыль по всем комнатам.
Глядя на рисунок выше интересно вспомнить про встроенный пылесос, который хорош тем, что не оставляет пыль внутри помещения, т.к. воздух из пылесоса выходит наружу. Однако, хотя встроенный пылесос выбрасывает пыль на улицу (см. Рисунок 5), во время работы он активно засасывает воздух в дом, а вместе с воздухом – пыль с улицы. Выходит, что он одновременно удаляет пыль с поверхностей и засасывает пыль вместе с наружным воздухом. До того, как пыль осядет, поверхности остаются чистыми.

Рисунок 5. Встраиваемый пылесос заносит пыль с улицы, т.к. фильтрует выходящий воздух и не фильтрует входящий.
На каждом из путей поступления пыли в квартиру можно поставить заслон. Тогда главная полезная функция обычного робота-пылесоса или обычного пылесоса будет выполняться эффективней. На этих потоках пыли можно поставить своего узкоспециализированного робота-пылесоса.
Например, поставить робота-кондиционера, фильтрующего воздух при проветривании, или просто электростатический фильтр на форточке. Нам нет необходимости ломиться в открытую дверь, т.к. уже существуют системы вентиляции, очищающие приток очищенного воздуха (http://www.aerokomfort.ru/vent/vent.htm).
Можно, поставить робота-чистильщика обуви, собирающего пыль с ботинок, или просто барьерные коврики (http://wcat-nsk.com/carpet/).
Роботы-пылесосы в многообразных воплощениях начнут выполнять свою работу до того, как пыль попадет на пол или на ковер.
Сделать заранее – это здорово! Появится целая бригада разных пылесосов, но это не тот обход патента, который ожидается в развернутой на сайте дискуссии (http://www.metodolog.ru/01218/01218.html). Кроме того, как бы бригада пылесосов на путях поступления пыли не старалась, все равно ковер пылесосить придется. Таким образом, возвращаемся к необходимости создать эффективный робот-пылесос. Анализ надсистемы не избавил нас от необходимости анализа объекта исследования.
МОЙ ПРОГНОЗ РАЗВИТИЯ РОБОТОВ-ПЫЛЕСОСОВ
Юрий Даниловский пишет (http://www.metodolog.ru/01213/01213.html), что проблемы получения большого количества возможных решений НЕТ. Была и есть проблема «правильного» ВЫБОРА возможного из решений. Что «пройдёт через фильтры рынка», то и есть «прогнозное решение».
Юрия интересуют прогнозы развития технических систем и, в частности, «пылесосостроения», поэтому в рамках дискуссии даю свой прогноз:
- Проблемы малой мощности роботов-пылесосов будут решены в ближайшем будущем.
- Роботы-пылесосы будут автоматически менять используемые насадки, т.е. будут использовать разные насадки для разных поверхностей, как и обычные пылесосы.
- Новые инструменты для роботов-пылесосов появятся после того, когда все виды инструментов обычных пылесосов будут повторены в роботах-пылесосах.
- Роботы-пылесосы будут проводить трёхмерную чистку.
- Устройства для проветривания будут "пылесосить" поступающий в квартиру воздух. Роботы-пылесосы на пути проникновения пыли в квартиру потеснят кондиционеры - охладители воздуха внутри помещений.
- Новые виды роботов-пылесосов будут появляться через применение роботов-пылесосов по новому назначению.
Устройства для проветривания, как роботы-пылесосы на пути проникновения пыли в квартиру, потеснят кондиционеры - охладители воздуха внутри помещений.
Применение роботов-пылесосов по новому назначению будет наиболее прибыльным бизнесом.
Роботы-пылесосы будут проводить трёхмерную чистку
Согласен с прогнозом (http://pylesos.com.ua/articles/article6.html), что роботы-пылесосы будут оборудованы добавочной "рукой" проводить "трёхмерную чистку", как показанный на рисунке аппарат (см. Рисунок 7 http://www.optimal-centre.ru/articles/article5.html). Однако неизбежно появятся роботы объемной чистки с другими средствами передвижения. Например, это может быть робот-пылесос, летающий как известный иллюзионист Дэвид Копперфильд (см. Рисунок 6). Лебедки в углах потолка эффективно доставят робота на шкафы, на стол и на диван.

Рисунок 6. Робот-пылесос сможет летать, как летает Дэвид Копперфильд.

Рисунок 7. Выход подметания в объем с помощью поднимающейся руки со щеткой.
Проблемы мощности нет.
Проблемы мощности для робота-пылесоса уже практически нет.
Уже существуют полноценные мобильные малые пылесосы (http://www.dyson.com.ru/range/feature_frame.asp?model=
DC16-SY-STD&sinavtype=menu), как например, портативный «беспроводной» пылесос Dyson DC16 (см. Рисунок 8 и Рисунок 9).
Уже испытываются аккумуляторные роботы-пылесосы для улицы (см. Рисунок 10). Если за час Figla Robot способен вычистить тысячу квадратных метров вне помещений, то проблем с мощностью и энергоемкостью у него нет (http://www.toplist.ru/news/142).
Проблемы малой мощности роботов-пылесосов будут решены в ближайшем будущем

Рисунок 8. Dyson DC16 Единственный портативный беспроводной пылесос без потери мощности всасывания.
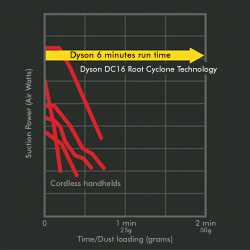
Рисунок 9. Мощность в два раза выше обычных пылесосов

Рисунок 10. Робот-пылесос Figla Robot для уборки вне помещений.
ДВИЖУЩИЕ СИЛЫ РАЗВИТИЯ РОБОТОВ-ПЫЛЕСОСОВ
Экономическая целесообразность определяет последовательность смены инструментов
Считаю, что изменение рабочего органа роботов-пылесосов будет происходить от наименее затратного переноса уже известного в чистящей технике к дорогостоящему поиску новых инструментов для решения узкоспециализированных задач. Такая последовательность определяется экономической целесообразностью.
Предложенный Андреем Матюшенко (http://www.metodolog.ru/01223/01223.html) способ чистки ковров с созданием проборов в ворсе – дорогостоящее направление создания новых инструментов для решения узкоспециализированных задач. Решение будет эффективным, если его доработать, но думаю, что сначала будут реализованы проверенные на обычных пылесосах технологии.
В первую очередь роботы-пылесосы используют весь арсенал средств уборки пыли и грязи, который уже используется в чистящей технике...
ПРОДОЛЖЕНИЕ и «ПОСЛЕСЛОВИЕ КАФЕДРЫ ПРОГНОЗОВ» ЧИТАЙТЕ В СЛЕДУЮЩИЙ ЧЕТВЕРГ.
В тексте сохранены авторская орфография и пунктуация.
|