Главная |
|
Размещено на сайте 25.10.2007. Предисловие ведущего рубрики Кафедра Прогнозов.
Дорогие читатели! Этим материалом мы открываем один из возможных форматов тренингов, полезных для развития способностей к прогнозированию эволюции техники, ну и, конечно, изобретательства, потому что одно не существует без другого.
Идея представляемого сегодня тренинга возникла после публикации моего материала в прошлый четверг 18.10.2007 «Пример про то, как прогнозисту «не поверили»»
Мой уважаемый коллега, Андрей Матюшенко предложил обойти решение, описанное в моём материале, как если бы это был реально существующий патент. Будем впредь называть такие эскизные описания технического решения «виртуальным патентом».
После чего я, поставленный в «трудное положение», должен буду как-то отреагировать своим новым решением в области проектирования новых роботов пылесосов. Получится небольшая учебная «патентная война», которая может иметь любое количество участников.
Этот вид мы коллективно назвали "патентный пейнтбол", для того чтобы отразить в новой Инженерной Игре бушующие в мире реальные патентные войны. Проблема обхода патентов актуальна, потому что суммы отчислений за использование чужих решений иногда сопоставимы с годовым бюджетом содержания мотострелкового полка, например.
Правила создаются (и корректируются) в процессе Игры, так же как и в реальных патентных войнах. Как у моего любимого Лао цзы:
«..одни существа идут, другие - следуют за ними; одни расцветают, другие высыхают; одни укрепляются, другие слабеют; одни создаются, другие разрушаются..»
Инициатива "пионерская", традиций пока нет, будем благодарны за любые
замечания и предложения. Развлекались сами и хотели развлечь вас.
Как говорят в таких случаях ведущие на телевидении: «оставайтесь с нами!»
С уважением, ведущий рубрики КП Юрий Даниловский yurydanilovsky@yandex.ru
Патентный пейнтбол. Робот – шнекоход. (часть 1)А. Матюшенко
Цель:
Цели дискуссии на дальнюю перспективу: можно ли обойти «обойденный» патент и как долго можно продолжать взаимный обход патентов – имеется ли критическая точка (ключевой патент), обойти который улучшением ТС с известным принципом действия уже невозможно?
Форма дискуссии: Выбирается любой (можно виртуальный) патент. Осуществляется обход этого патента. Автор обойденного патента выдвигает новую формулу – обходит новый патент. Так происходит несколько раз.
На каком примере показать «цепочечный обход»? Патент
 Рис. 1 Запатентованный образец на рынке (Rumba)
Виртуальный патент (Юрия Даниловского)
Выберем виртуальный патент на пылесос, использующего шнековый принцип перемещения. Такой пылесос был изобретен Юрием Даниловским для одного из Заказчиков и описан в рубрике «Кафедра Прогнозов» http://www.metodolog.ru/01213/01213.html. 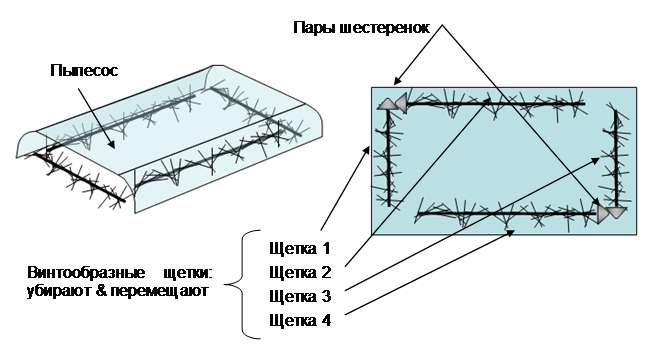 Рис. 2 Патентуемое устройство (Даниловский)
Какие отличительные признаки этого изобретения? 1. Машина перемещается с помощью щеток, при этом отпадает необходимость в наличии колес и электродвигателей для них. Это позволяет уменьшить количество потребляемой электроэнергии и снизить стоимость машины.
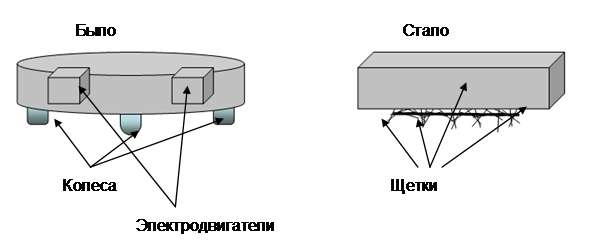 Рис. 3 Машина перемещается с помощью щеток
2. Щетки попарно соединены, что уменьшает количество используемых электромоторов и повышает эффективность уборки пыли.
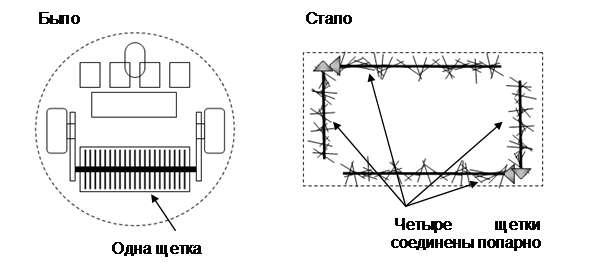 Рис. 4 Щетки соединены попарно
3. Машина крутится на месте, включая воздухозабор только периодически – а именно, после того, как щетки «поднимут» пыль под крутящейся на месте машиной. Это дает экономию электричества благодаря периодической работе воздухозаборника и уменьшает количество выбрасываемых «нефильтруемых вредностей». 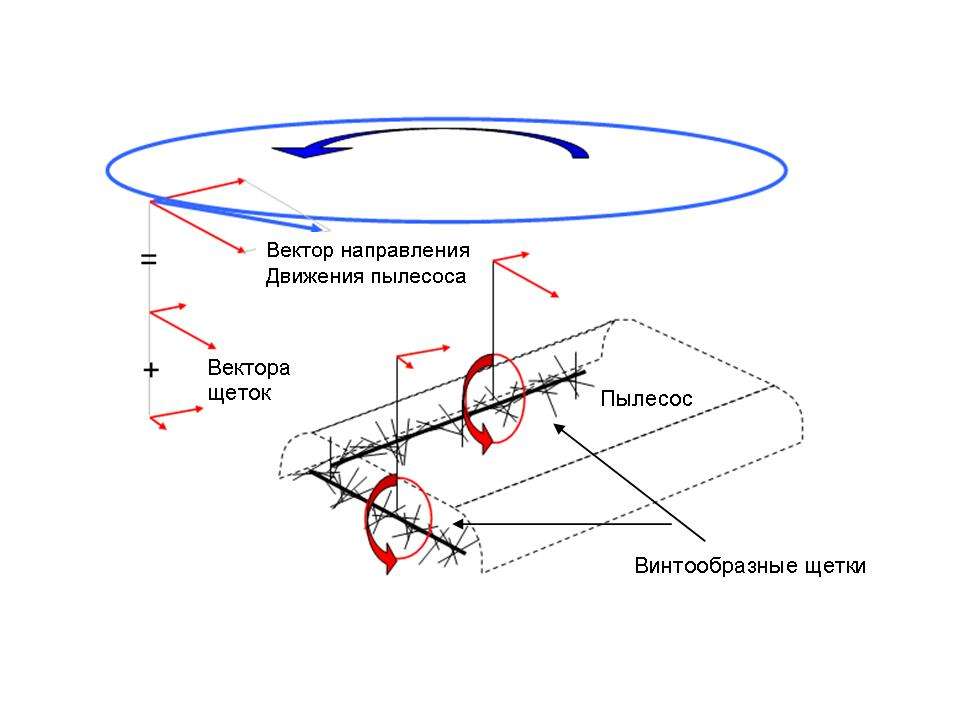 Рис. 5 Способ перемещения (круговое перемещение)
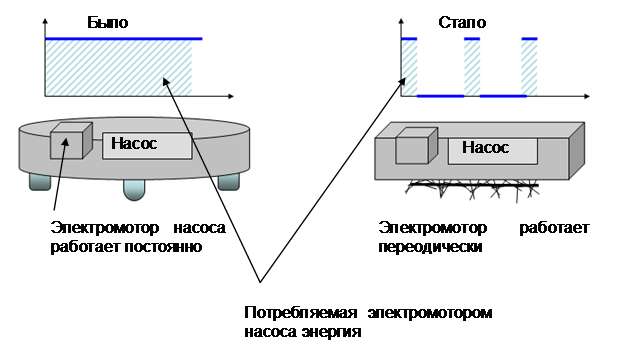 Рис. 6 Периодическое включение воздухозабора
4. Выдуваемый воздухозаборником воздух направляется обратно под пылесос через пневмоконструкцию гофрированной полой юбки, содержащую сопла с клапанами избыточного давления, направленные к центру симметрии всего пылесоса. Рекуперация механической энергии движущегося воздуха позволяет экономить электрическую энергию, а также детали электроприводов и устранять щель между полом и пылесосом для обеспечения феномена нарастания напора в момент исчезновения щели («пневмоимпульс»).
 Рис. 7 Рекуперация воздуха
5. Ось крепления каждой пары щёток смещена относительно оси симметрии щётки для обеспечения эффекта вибрации во время механической уборки. Вибрация создаст полезные «пневмоимпульсы» (чередующиеся разряжения/ сжатия воздуха под корпусом пылесоса), которые повысят эффективность отрывания пыли от ворсинок ковра в период механического отрывания пылинок от ворса и дадут экономию электрической энергии, т.к. одномоментно будет использовано 2 способа отрывания пылинок от ворса – механический удар щетинки и «пневмоимпульсы».
 Рис. 8 Эксцентрическая щетка
Формулируем независимые пункты этого изобретения. 1. Устройство, состоящее из корпуса, аккумулятора, электродвигателей и винтообразных щеток, предназначенное для уборки и перемещения пылесоса. 2. Устройство включает в себя шестеренки под 45 градусов на краях осевых стержней щеток, благодаря чему винтообразные щетки соединены попарно. 3. Способ уборки, заключающийся в круговом перемещении машины перед включением воздухозаборного устройства. 4. Устройство полой юбки, состоящее из внешнего и внутреннего воздухонепроницаемого слоя вещества и каналов во внутреннем слое, преимущественно трубчатой формы и направленных к центру симметрии всего пылесоса; клапанов избыточного давления на конце каждого из сопел («полая резиновая пружина»); и клапанов избыточного давления на конце каждого из сопел для обеспечения феноменов «пневмоимпульсов».
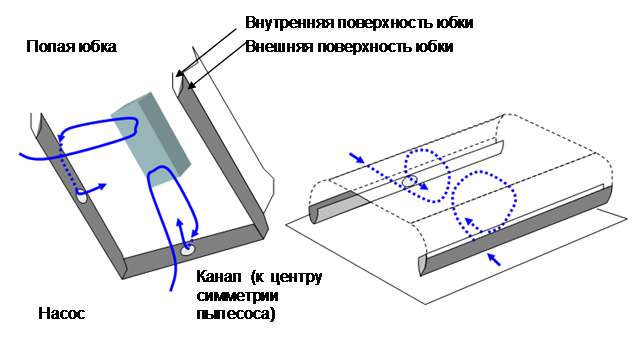 Рис. 9 Устройство полой юбки
5. Устройство винтообразной щетки, состоящее из круглого механического стержня и ворсинок различной длины, закрепленных на этой оси. Длина ворсинок изменяется таким образом, что при касании ворсинок убираемой поверхности и вращении оси, обеспечивается вибрация пылесоса.
Обход нового патента
Попробуем обойти патент. Сначала предпримем подготовительные шаги, направленные на выяснение того, что же мы хотим получить в результате обхода и что для этого надо сделать. Затем мы изменим некоторые признаки с получением нового качества. После этого мы посмотрим на результаты применения одного из законов развития. И, наконец, мы свернем некоторые элементы пылесоса. Подготовка к обходу
Подготовительный шаг 1. Что представляет из себя существующая ТС? Особенности пылесоса, изобретенного Юрием Даниловским, описаны выше. Мы посмотрим только на общую схему такого пылесоса.
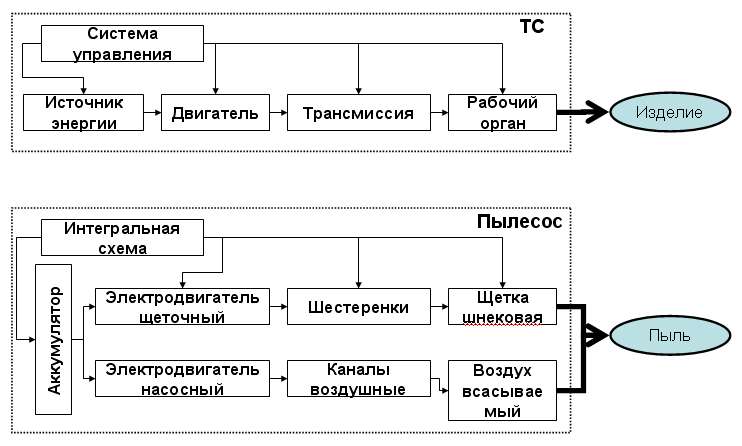 Рис. 10 Схема существующей системы
Сразу бросается в глаза наличие двух рабочих органов, двух трансмиссий и двух электродвигателей. Как видно, ни один из рабочих органов не выполняет главную полезную функцию адекватно. Мы можем повысить эффективность одного из рабочих органов, а другой (вместе с двигателем и трансмиссией) свернуть. Какой из двух рабочих органов лучше свернуть? Согласно закону повышения динамизации воздух является «более продвинутым» рабочим органом, нежели механическая щетка. Но у нас есть ограничение: не изменять механическое «подметание» пола щеткой. Мы можем свернуть некоторые компоненты этой схемы, но щетку обязаны оставить…
Подготовительный шаг 2. Что же мы хотим получить в результате?
 Примечание: Рис. 11 Что хотим в результате?
Допустим, что мы хотим повысить идеальность пылесоса путем дальнейшего развития существующего (запатентованного).
Подготовительный шаг 3. Что сделать для дальнейшего развития? Мы можем, конечно, использовать весь арсенал ЗРТС. Однако, рекомендованный закон в данном случае – один. Это закон повышения согласованности ТС.
 Примечание: Рис. 12 Что делать?
Подготовительные шаги показали: что из себя представляет существующая техническая система; что мы хотим получить в результате обхода и что для этого надо сделать.
Работа с патентомДавайте попробуем обойти и этот патент. Выберем только два направления обхода патента:
Изменение признаков с получением нового качества
Шаг 1. «Привязываем» патент к ТС. Для этого мы устанавливаем компоненты, которые указаны в патенте в качестве признаков (независимых пунктов формулы изобретения).
 Рис. 13 От признаков к компонентам
Обратите внимание на то, что компонент «шнековая щетка» как признак «винтообразная щетка» указана в трех пунктах из пяти.
Шаг 2. Определяем недостатки, присущие компонентам ТС. Для этого мы проводим функциональный и потоковый анализы. Покажем только несколько недостатков, а рассмотрим в качестве примера только один из них.
 Рис. 14 Недостатки компонентов
Обратите внимание на то, что шнековая щетка убирает поверхность с низким качеством. Почему?
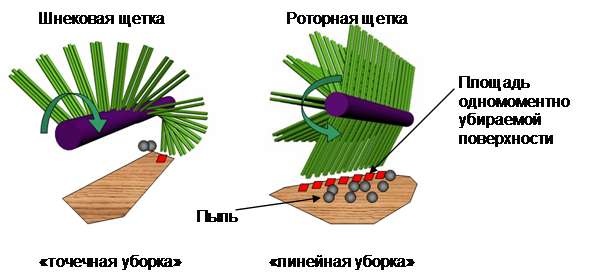 Рис. 15 «Точечная уборка»
Как видно из рисунка, площадь одномоментно убираемой поверхности шнековой щеткой чрезвычайно мала. Условно назовем ее «точечная уборка». Возникает необходимость очень быстро крутить щетку. Однако шнековая форма такой щетки позволяет ей осуществлять движение вдоль оси такой щетки. Радиальная щетка одномоментно убирает большую поверхность, по линии контакта ряда пучков. Условно назовем ее «линейная уборка». ГПФ выполняется гораздо лучше – и это главное.
Шаг 3. Определяем ключевые недостатки. Для этого «прогоняем» недостатки, полученные в результате различных видов анализа, через причинно-следственные цепочки.
 Рис. 16 От недостатков к ключевым недостаткам
Шаг 4. Решаем ключевые задачи. Для этого формулируем ключевую задачу и решаем ее любым доступным способом. В данном случае ключевая задача звучит так: «Как обеспечить удержание пылинок щетинками?». Один из вариантов решения такой задачи: осуществить функционально-ориентированный поиск (ФОП) по главной полезной функции (ГПФ) «удерживать пыль/грязь (щетинками)» и базу физических эффектов.
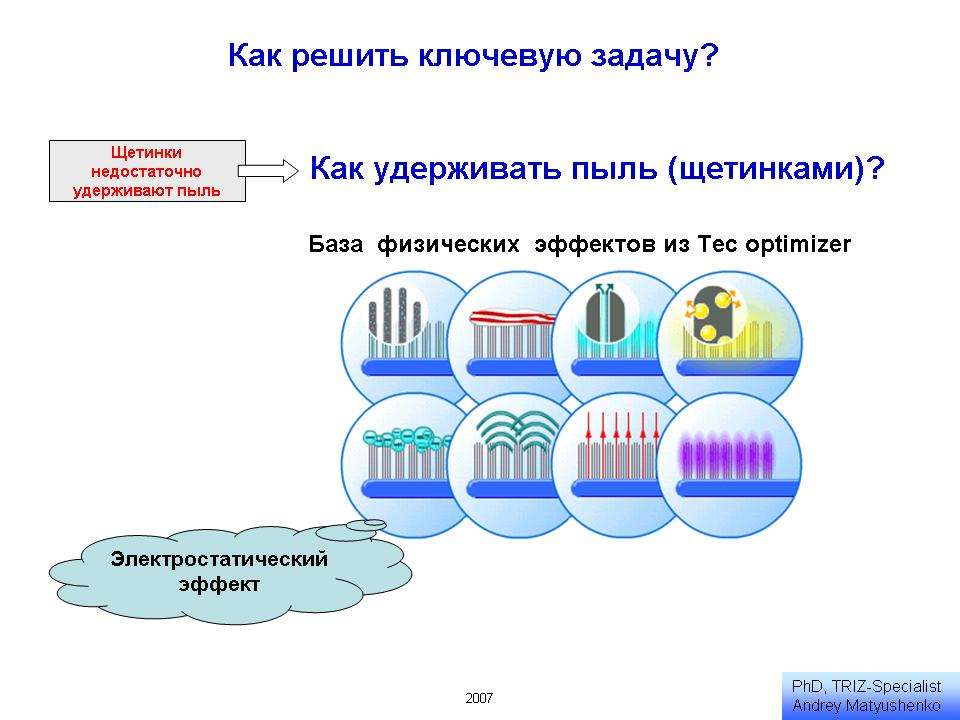 Решение: электростатическая щетка.
Рис. 17 Поиск решения ключевой задачи
Возможно нахождение решения в патентных базах, с помощью Интернет, или нахождение физ. эффекта в Техоптимайзере. Возможно, потребуется решение вторичных/адаптационных задач.
Шаг 5. Решаем адаптационные задачи.
Рассмотрим только один пример адаптационной задачи, касающийся щетки. Щетку шнековую мы поменяли на щетку роторную электростатическую. Но как управлять движением такой щетки? Предлагается следующий способ перемещения пылесоса: перемещать центр масс пылесоса.
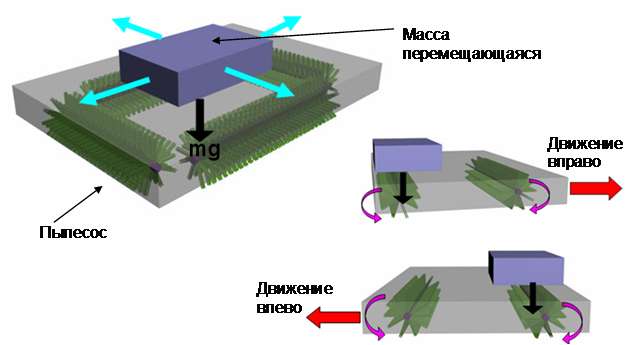 Рис. 17 Способ перемещения пылесоса на роторных электростатических щетках
Как видно из рисунка, перемещая центр масс аккумулятора пылесоса к его краю, изменяется сила сцепления щеток с поверхностью. Щетка, над которой располагается центр масс, сильнее прижата к поверхности и лучше «цепляется» за нее. У противоположной щетки щетинки более свободно «проскальзывают» по поверхности. Обе щетки вращаются «под пылесос» - в противоположных направлениях. В результате пылесос перемещается в сторону, противоположную перемещению центра масс. Например, смещая массу влево, пылесос начинает движение вправо. Можно дать ещё одно объяснение: перемещение центра масс аккумулятора приводит к тому, что уменьшается диаметр щётки как колеса, соответственно - увеличивается радиальная скорость. Аналогия - танк, только используется другой механизм увеличения (уменьшения) скорости у движителя: не увеличение количеств а оборотов, а изменение геометрических размеров ( диаметра). Какие ресурсы имеются для решения этой адаптационной задачи? Ресурсный анализ показал, что имеются несколько подходящих ресурсов:
Очень бы хотелось для перемещения массы применить вибрацию (в резонансном режиме) – исключительно удобно, да к тому же можно «регулировать вес». Однако, к сожалению, заставить «парить над поверхностью» корпуса трехкилограммовый аккумулятор – задача непосильная в данном случае. Если бы уборка была бы влажная, и пылесос «уже таскал на себе воду» (пусть и предназначенную для уборки – грязную), то я выбрал бы воду в качестве перемещающейся массы. Однако уборка – сухая. Остается последний подходящий ресурс – аккумулятор. Ставим задачу. Как обеспечить перемещение (тяжеленького) аккумулятора на корпусе пылесоса?
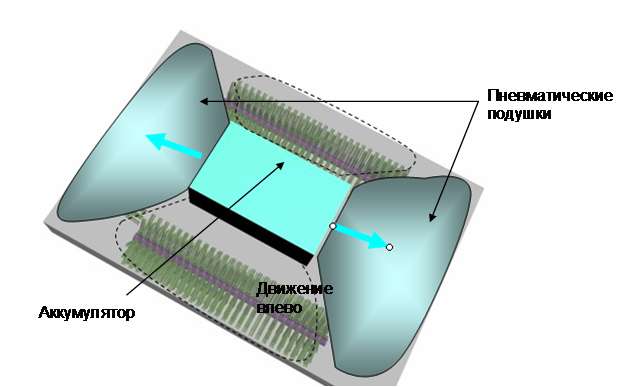 Рис. 18 Перемещение центра масс пылесоса перемещением аккумулятора
Как видно из рисунка, один из вариантов перемещения аккумулятора (на шарнирных колесиках) – надувать одну пневматическую подушку и сдувать противоположную. Ресурс «воздух» и «насос» у нас есть. Итак, в таком варианте необходимо добавить 4 пневмоподушки («воздушных шарика» или «аэрбэга» как в автомобиле). Шаг 6. Повтор. Мы рассмотрели изменение только одного признака с получением нового качества. Сделаем повтор шагов 2 – 4 для каждого признака.
 Как видно, не все компоненты обладают существенными недостатками, однако видно, многие признаки можно изменить, получив новое качество каждого из них.
Шаг 5. Формулируем компонентный состав новой ТС.
 Рис. 18 Компоненты новой ТС, обладающие новым качеством.
Что же мы получаем в результате замены признаков?
 Рис. 19 Неэквивалентная замена
Все пять независимых пунктов формулы изменены с получением нового качества. Формально мы полностью обошли патент.
Патент Юрия мы обошли. Однако этот путь - не самый надежный. Гораздо более «сильным» обходом является свертывание компонентов.
В тексте сохранены авторская орфография и пунктуация. |
Главная |
|