Заметки к развитию технического средства «самолет»
Голдовский Б.И.
1 Предисловие
Одним из основополагающих представлений ТРИЗ является тезис о подчинении развития технических систем соответствующим законам, действие которых заставляет человека изменять существующие технические системы тем или иным образом, независимо от его воли. В этом плане было бы интересным проследить действие законов развития технических систем (ЗРТС) по реальной истории развития какого-либо технического средства, а не по патентному фонду, поскольку далеко не все патенты реализуются, а среди реализуемых патентов заметная часть может значительно опережать время своей реализации, что, в общем-то, свидетельствует об известном отрыве человеческой мысли (фантазии) от реалий жизни.
В качестве подходящего технического средства автору показалось целесообразным выбрать «самолет» по следующим причинам:
- по истории развития самолета существует достаточно подробная литература, в которой приведены не только описания конструкций и отдельных технических решений, но и дан определенный инженерный анализ процесса развития (например, [1], [2], [3]);
- самолет, являющийся современным техническим средством, имеет более чем 100 летнюю историю развития, во время которой данное техническое средство пережило несколько революционных и множество эволюционных преобразований, что позволяет надеяться обнаружить наглядное подтверждение действия ЗРТС.
Кроме того, автору (в силу его технической специальности) данная область техники знакома, что поможет избежать неверных выводов, связанных с техническим непониманием.
Конечно в современных условиях, когда передовой фронт развития техники предполагает синтез «нано - био - информационных технологий», выбор для анализа истории развития образца «железной» техники может вызвать сомнения. Получается, что изучая уходящие с переднего края развития технические средства, мы опять «готовимся к прошедшей войне». Однако ЗРТС были сформированы главным образом на основе «железной» техники. Поэтому и подтверждение действия этих законов необходимо искать на соответствующей базе. Проверка применимости ЗРТС к современным технологиям - это отдельная задача, которую целесообразно решать, удостоверившись, что имеющееся представление о ЗРТС и механизме их действия адекватно действительности.
2 Что такое самолет
Чтобы как-то обозначить объект развития, необходимо дать определение техническому средству (системе) «самолет». В данной работе под «самолетом» будет пониматься техническая система, обеспечивающая выполнение функции «транспортировка человека и/или груза в атмосфере планеты Земля без опоры на поверхность планеты в процессе транспортировки» за счет принципа действия «удержание над поверхностью планеты путем компенсации силы веса аэродинамической подъемной силой, возникающей при движении технической системы в воздушной среде за счет взаимодействия внешней (преимущественно не меняющейся при движении) конфигурации (формы) технической системы с этой воздушной средой». Соответственно в технической системе можно будет выделить две основные (ключевые) подсистемы, обеспечивающие реализацию функции и принципа действия:
- движительно-двигательная подсистема, обеспечивающая создание силы тяги, необходимой для движения;
- планер, включающий элементы для создания подъемной силы, а также для управления движением в воздушной среде.
Естественно, в состав системы «самолет» входят и другие подсистемы (как и в состав подсистемы «планер» входят элементы кроме указанных выше), но основное внимание будет уделяться этим двум основным (ключевым) подсистемам.
Для того чтобы реализовать выполнение принципа действия, необходимо выполнение следующих условий:
1) максимальная аэродинамическая подъемная сила должна быть не меньше максимального взлетного веса самолета;
2) должны быть в наличии средства управления направлением движения в трехмерной среде (в вертикальной и горизонтальной плоскостях);
3) должна быть обеспечена устойчивость движения в трехмерной воздушной среде;
4) прочность и жесткость конструкции самолета (в первую очередь – планера) должны выдерживать эксплуатационные нагрузки, сохраняя форму элементов планера, необходимую для получения требуемых аэродинамических характеристик;
5) тяга движительно-двигательной установки должна быть не меньше, чем аэродинамическое сопротивление самолета при движении в воздушной среде с заданной скоростью.
Условия приведены по степени важности. Первое условие обеспечивает работоспособность системы с данным принципом действия. Второе условие обеспечивает нормальное функционирование транспортного средства в среде. Третье и четвертое условия обеспечивают надежность функционирования. Пятое условие обеспечивает получение параметра, важного для функционирования транспортного средства.
Выполнение всех перечисленных условий соответствует так называемому «уверенно летающему самолету».
Касательно устойчивости движения целесообразно дать некоторые пояснения. Для объекта, движущегося в среде и не имеющего опоры вне её, возможны два типа устойчивости движения: динамическая и эксплуатационная. Все надводные суда, например, не обладают динамической устойчивостью в горизонтальной плоскости, и удержание на курсе обеспечивается только за счет непрерывных перекладок руля, то есть обеспечивается лишь эксплуатационная устойчивость. На подводных лодках, которые движутся в трехмерном пространстве, из соображений безопасности (чтобы из-за ошибок рулевого не выскочить на поверхность или не провалиться за предельную глубину) стали обеспечивать динамическую устойчивость в вертикальной плоскости, для чего на корпусе подводной лодки стали устанавливать кормовые горизонтальные стабилизаторы. Требуемые знания по обеспечению динамической устойчивости для подводных лодок были восприняты из опыта строительства и эксплуатации близкого аналога – дирижаблей. При наличии динамической устойчивости нагрузка на рулевого по удержанию параметра движения (глубины, высоты, курса) значительно снижается. Можно также отметить, что часть первых самолетов, включая самолеты братьев Райт, обладали только эксплуатационной устойчивостью, что существенно усложняло их пилотирование.
Для выполнения условий, обеспечивающих полет, планер самолета должен включать как минимум следующие элементы:
- крыло – специальный элемент, на котором образуется подъемная сила при движении в воздушной среде;
- горизонтальный руль – для управления по высоте;
- вертикальный руль – для управления по курсу (по направлению в горизонтальной плоскости);
- средства для управления креном (поперечного управления);
- хвостовые горизонтальный и вертикальный стабилизаторы (хвостовое стабилизирующее оперение) – в случае обеспечения динамической устойчивости;
- пост летчика с приводами к средствам управления;
- опоры для обеспечения взлета и посадки;
- центральная конструкция, объединяющая элементы планера в единую структуру.
В настоящее время центральная конструкция имеет вид объемного фюзеляжа, но на ранних стадиях развития самолета она могла иметь вид балки, рамы или комбинации объемной формы с рамой.
Средства для управления креном в настоящее время имеют вид элеронов, но на первых самолетах для этого использовалось перекашивание (искривление) профиля концов крыла.
Использование для создания подъемной силы специального элемента в виде крыла, имеющего аэродинамический профиль, позволило обеспечить для самолета аэродинамическое качество (отношение величины подъемной силы к силе аэродинамического сопротивления) существенно больше единицы. В результате отношение транспортной мощности, равной произведению веса (подъемной силы) на скорость полета, к мощности силовой установки для самолета получается также больше единицы. Для сравнения: у вертолета, где для движения используется часть силы тяги несущего винта, это отношение заметно меньше единицы. Именно поэтому из летательных аппаратов тяжелее воздуха самолет поднялся в воздух и завоевал соответствующие функциональные ниши гораздо раньше вертолета. Однако за такое эффективное преобразование тяги силовой установки в подъемную силу пришлось расплачиваться необходимостью для самолета осуществлять разбег при взлете и пробег при посадке. То есть функционирование самолета требует обязательного наличия некой взлетно-посадочной полосы (на твердой или жидкой среде), то есть затрат определенного природного ресурса. Этот отрицательный эффект составляет сторону базового противоречия, присущего системе «самолет» и обусловленного применяемым в этой системе принципом действия.
Следует напомнить, что указанное преимущество самолетного принципа действия перед вертолетным на заре создания летательных аппаратов тяжелее воздуха осознавалось далеко не всеми. Во второй половине 19-го века наиболее перспективным считался как раз полет за счет винтов, создающих вертикальную тягу[1]. Подтверждением этому может служить число выданных в это время «вертолетных» патентов, превышающих число «самолетных», а также, например, романы Ж.Верна, который всегда отслеживал передовые технические идеи своего времени («Робур-завоеватель», 1886г.). И только достаточно грамотные инженеры смогли оценить в то время перспективность самолетного принципа действия, который до настоящего времени подтверждает свою эффективность в части использования энергии для полета в воздушной среде. К примеру, через 70 лет после первого авиационного перелета через Ла-Манш (1909 год, самолет «Блерио-11») был осуществлен аналогичный перелет самолета Gossamer Albatross, приводимого в движение только мускульной силой человека [4].
Условие превышения максимальной аэродинамической подъемной силы над максимальным взлетным весом самолета имеет несколько количественных градаций (порогов). При небольшом превышении обеспечивается подъем в воздух и полет по прямой. Для обеспечения маневрирования по высоте, а также по курсу только за счет рулей (без создания крена) максимальная подъемная сила должна превышать вес самолета не менее чем в 1, 2 раза. Если же для выполнения крутых поворотов в горизонтальной плоскости используется создание крена (при котором для увеличения центростремительной силы привлекается часть подъемной силы крыла), превышение максимальной подъемной силы над весом должно быть не менее 50% [3].
Функция «транспортировка груза и/или человека» количественно определяется тремя основными параметрами: скорость транспортировки, масса (вес) перемещающегося (транспортирующегося) объекта (общий вес транспортного технического средства) и дальность транспортировки. Все эти параметры находятся в отношении противоречия друг с другом. При постоянной мощности силовой установки транспортного средства с ростом его веса достижимая скорость уменьшается. При постоянных весе транспортного средства и запасе (количестве) энергии (топлива), находящемся на нём, с ростом скорости дальность транспортировки сначала может расти до некоторого небольшого значения скорости, а затем начинает уменьшаться. При постоянной скорости и запасе энергии транспортного средства с увеличением его веса дальность транспортировки уменьшается. То есть основные параметры, характеризующие процесс транспортировки с помощью автономного транспортного средства, конкурируют между собой за использование энергетического ресурса: запаса энергии и/или мощности.
Для технического средства «самолет» с параметром «вес» связан параметр «подъемная сила», поскольку их соотношение определяет работоспособность этого технического средства. Согласно [3] величина подъемной силы пропорциональна аэродинамическому качеству, мощности и эффективному размаху крыла, а скорость пропорциональна мощности и обратно пропорциональна эффективному размаху крыла. То есть обеспечение подъемной силы и скорости самолета также находятся в состоянии противоречия. Причем отношение противоречия здесь более острое по сравнению с противоречием «вес – скорость», поскольку с ростом подъемной силы крыла существенно возрастает так называемое индуктивное сопротивление крыла, которое может составлять до 90% от общего аэродинамического сопротивления самолета.
Изложенное выше о технической системе «самолет», представляющей собой весьма общее понятие, применимо к целому классу реальных технических средств, попадающих в область действия этого понятия.
3 Основные этапы развития самолета
Приведенная на рис.1 зависимость изменения скорости самолетов во времени (построенная в соответствии с [3]) позволяет выделить пять этапов развития самолета. Первый этап – от момента первых полетов до создания уверенно летающих самолетов, занявших определенные функциональные ниши и строящихся небольшими сериями. Второй этап соответствует зарождению гражданской авиации и переходу архитектуры планера к оптимальной конфигурации – фюзеляжному моноплану со свободнонесущим крылом. Эта конфигурация сохраняется до настоящего момента как основная в самолетостроении, претерпевая изменения, связанные главным образом с изменением силовой установки и скоростных режимов движения. Именно этим изменениям соответствуют три последних этапа: завершение развития самолетов с винто-поршневой силовой установкой, реактивные дозвуковые самолеты и реактивные сверхзвуковые самолеты. Наибольший интерес вызывают первые два этапа развития самолета, в течение которых было наибольшее число существенных изменений этой системы. К этим этапам целесообразно добавить и третий этап, на примере которого можно проследить процесс «выжимания» возможностей из принципа действия силовой установки. Поэтому в данной работе будет рассматриваться развитие самолета с винто-поршневой силовой установкой, соответствующей первым трем этапам. При этом силовая установка будет рассматриваться главным образом как объект, характеризующийся некоторыми внешними показателями, а основное внимание будет уделено развитию планера как подсистемы.

Рисунок 1 – Изменение наибольшей скорости системы «самолет» во времени
4 Перед первым этапом
Первому этапу создания летающих самолетов предшествовал длительный предварительный период накопления идей и создания образцов самолетов, которым не удалось взлететь [1]. На рубеже 18-19 веков англичанин Д. Кейли расчетами и испытаниями моделей (в том числе – на ротативной машине) показал возможность создания летательного аппарата тяжелее воздуха с неподвижным крылом. В 1842 году также в Англии был опубликован проект самолета У. Хансена, в котором присутствовали практически все элементы, необходимы для полета (рис. 2).
В 1891 году был опубликован проект швейцарского художника К. Штайгер-Кирхгофа, в котором он предсказал оптимальную форму самолета (рис. 3).
В [1] сказано, что в период с середины 1870-х годов по осень 1903г. было построено 13 самолетов: 5 с паровым и 8 с бензиновым двигателями, строительство еще 3 самолетов осталось не завершено. На некоторых из них были предприняты попытки полета, но они окончились неуспешно: ни один из самолетов не смог продержаться в воздухе больше нескольких секунд, большинство испытаний закончилось авариями. Анализ причин этих неудач показал, что в 1870-1880-е годы самолеты не могли подняться в воздух из-за большого веса двигателей и малой подъемной силы плоского крыла. С 1890-х годов на ряде самолетов эта причина была преодолена (даже с использованием паровых двигателей), но основными препятствиями на пути создания самолета стали недостаточная управляемость, устойчивость, а также прочность летательных аппаратов. Преодолеть указанные недостатки при отсутствии теоретической базы позволил опыт планеризма, на основе которого и были созданы первые работоспособные самолеты. Тот же самолет братьев Райт был создан путем установки силовой установки на удачную и «обкатанную» конструкцию планера (рис. 4).

Рисунок 2 - Проект самолета У. Хенсона (1842г.)

Рисунок 3 - Проект самолета К. Штайгер-Кирхгоффера (1891г.)
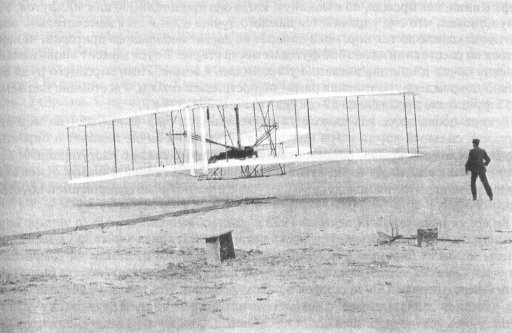
Рисунок 4 - Взлет самолета братьев Райт 17 декабря 1903г.
5 Первый этап развития самолета
5.1 Подэтап 1.1
В первом этапе развития самолета, который длился с 1904г. по первую половину 1914г., можно выделить два подэтапа. В течение первого подэтапа (1.1), с 1904г. по 1910г., произошел переход от взлетающих самолетов к уверенно летающим самолетам, в течение второго (1.2) самолет приобрел параметры, обеспечивающие его практическое применение. Поскольку создание самолета на первом этапе происходило практически без поддержки науки и необходимые знания приобретались в процессе испытания опытных конструкций, число разнообразных типов самолетов, создававшихся в течение первого подэтапа было очень велико. В принципе это соответствует закономерности взаимного замещения ресурсов, сформулированной в [5]: каждый результат может быть получен преимущественным использованием одного из видов ресурсов - пространства, времени, вещества, энергии, информации; причем недостаточное количество одного из видов ресурса может быть скомпенсировано другим видом ресурса. Например, первые самолеты, как отмечалось выше, не имели динамической устойчивости, что приводило к необходимости значительных затрат информационного ресурса на управление. Уменьшение расхода этого ресурса добились за счет увеличения затрат вещества (массы), установив хвостовые стабилизаторы.
Можно также отметить, что, столкнувшись с трудностями управления самолетом, не имеющим динамической устойчивости, изобретательская мысль попробовала заменить человека автоматической системой поддержания устойчивости. Это соответствует базовой закономерности передачи технике функций человека («вытеснение человека из ТС»), которая проистекает из самого предназначения техники. Поскольку при существующем уровне техники системы автоматического управления создавали на базе механики (маятниковая стабилизация), устройства получились слишком тяжелыми и ненадежными и в практику не вошли. Реальные системы автоматического управления самолетом, созданные с использованием более сложных форм движения материи, соответствующих сложности задачи (электроника и электрический сервопривод), стали использоваться на самолетах только в 70-е годы 20-го века.
Под информационным ресурсом в [5] рассматривалось управление процессом. Однако при создании технических средств используется ещё один вид информационного ресурса – знания, в частности о природных процессах, обеспечивающих функционирование. Недостаток этого ресурса всегда приводит к избыточности других видов затрат. Например, отсутствие необходимых знаний при проектировании приводит к необходимости принимать большие запасы по веществу и энергии («коэффициент незнания»). Тотальное незнание, характерное для начальных этапов создания самолета, и приводило к избыточным затратам иных видов ресурсов в виде большого количества опытных конструкций.
Неизбежность компенсации недостатка информационного ресурса в виде знания другими видами ресурсов вообще-то самоочевидна. Но эта самоочевидность подтверждает объективность более общей закономерности взаимного замещения ресурсов, сформулированной в [5].
В конце концов, к 1909г. многообразие опытных конструкций практически свелось к двум основным типам: фюзеляжному моноплану и бесфюзеляжному биплану. Типичным представителем первого типа является, например, самолет «Блерио-11» (рис. 5), а второго - «Фарман-3» (рис.6).
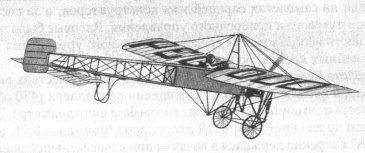
Рисунок 5 – Самолет «Блерио-11»
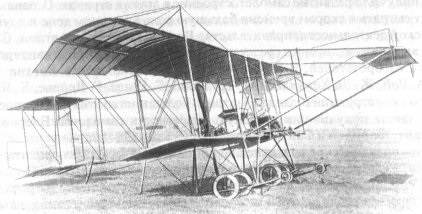
Рисунок 6 – Самолет «Фарман – 3»
Одновременно А. Фарманом в 1909г. была изобретена схема управления самолетом, включающая единую ручку для управления по высоте и по крену и педали для управления вертикальным рулем. Эта схема, позволившая освободить одну руку пилота, стала в последствии применяться на всех самолетах.
Для управления самолетом к этому моменту перестали использовать искривление (перекашивание) профиля крыла или изгиб связей хвостового оперения, поскольку жесткость конструкций возросла и подобное управление потребовало слишком больших усилий от пилота. Повсеместно стали использовать отдельные сравнительно небольшие управляющие элементы (элероны, рули), отклоняющиеся на большой угол, превышающий угол перекоса крыла или отклонения связей. То есть от небольшого изменения целого перешли к большому изменению части.
Два конкурирующих конструктивных типа самолета (моноплан и биплан) соответствуют двум направлениям разрешения противоречия между скоростными качествами и грузоподъемностью (весом, подъемной силой) самолета при весьма ограниченной мощности силовой установки. Стремление повысить скорость за счет снижения аэродинамического сопротивления путем уменьшения размеров самолета привело к моноплану. А потребность в повышении транспортных способностей за счет увеличения грузоподъемности привело к биплану, хотя при этом пришлось пожертвовать скоростью.
Необходимо отметить, что успех подэтапа 1.1 в развитии самолета был обусловлен главным образом достижениями в авиационном двигателестроении: были созданы ДВС с мощностью 35-50 л.с. и удельной мощностью 0,5-0,6 л.с./кг. И вообще все дальнейшие успехи в развитии самолета были обусловлены ростом фактической и удельной мощности авиационных двигателей (рис. 7).

Рисунок 7 – Изменение удельной мощности поршневых авиационных двигателей
5.2 Особенности технических решений подэтапа 1.1
При создании уверенно летающего самолета были реализованы, разумеется, законы построения ТС: закон соответствия функции и структуры; закон обеспечения требуемого прохода потоков энергии и вещества; закон преодоления порога минимальной динамичности (управляемости) [6]; закон преодоления порога функционирования (то есть пороговых значений отношения максимальной подъемной силы к взлетному весу) [6]. При создании бипланов, ориентированных на максимум грузоподъемности, реализовывались в первую очередь те технические решения, которые способствовали достижению этой цели при ограничении на величину мощности двигателя [6]. В частности, на рис. 6 видно, что использовался толкающий воздушный винт, КПД которого было несколько выше, чем у тянущего, и передний руль высоты, управляющая сила которого совпадает с направлением маневра (при подъеме сила на руле направлена вверх, а при снижении – вниз) и не вычитается из изменения подъемной силы крыла.
Архитектура как моноплана, так и биплана, показанных на рис. 5 и 6, характеризуется наличием множества элементов, увеличивающих аэродинамическое сопротивление: стоек, мачт и растяжек. Это было обусловлено необходимостью обеспечить одновременно минимальный вес и требуемую прочность конструкции планера. При ограниченной мощности двигателя, которая являлась главным ресурсом в создании подъемной силы, основное внимание уделялось снижению веса за счет использования конструктивных решений, взятых из кораблестроения и строительства (мачты, растяжки, гибкие оболочки (полотно), фермы). Эти конструктивные решения были интуитивно найдены в глубокой древности. Затем в 1897 году великий русский инженер и ученый В.Г.Шухов впервые доказал, что прочность материала используется наилучшим образом, если он работает на усилия сжатия либо растяжения (вызывающие однозначные напряжения), и наихудшим – если на изгиб (вызывающим двузначные напряжения); что число ступеней в передаче нагрузки пролетной конструкции на опоры должно быть минимальным [7].
Действительно, растяжки и гибкие оболочки работают только на растяжение, а стойки и стержни – на растяжение или сжатие. Но для того, чтобы с помощью простых элементов воспринять сложную нагрузку, обеспечивая при этом минимизацию массы, необходимо несколько таких элементов объединить в сложную структуру, приводящую к затратам ресурсов пространства. Если же попытаться заменить эту структуру одним элементом (из того же материала) со сложным напряженным состоянием, например, рамную конструкцию балкой, то получиться выигрыш в объеме (в ресурсе пространства), но проигрыш в массе. Чтобы выиграть и в массе, необходимо применять материал с внутренней структурой, сложность которой будет соответствовать сложности напряженного состояния [6]. Например, легированный металл или композитный материал.
Интересно, что замена нескольких предельно простых элементов одним элементом, выполняющим аналогичную суммарную функцию, не дает безусловного выигрыша и в других типах технических средств. Например, в трубопроводных системах наиболее простыми элементами являются трубы. Замена двух труб коаксиальной трубой (труба в трубе) дает лишь небольшой выигрыш в максимальном габарите, явно проигрывая в массе. Поэтому подобные трубы в обычных системах не применяются. Однако в криогенных трубопроводах, где труба покрывается толстым слоем теплоизоляции, коаксиальный трубопровод дает выигрыш и в габаритах и в массе. Подобная картина получается при замене, например, нескольких клапанов одним многоходовым клапанным агрегатом. То есть, если элемент не является предельно простым (практически не имеющим избыточности) и содержит вспомогательные подсистемы, обладая, соответственно, некоторой конструктивной избыточностью, замена нескольких таких элементов одним многофункциональным элементом позволяет сократить затраты ресурсов как раз за счет уменьшения суммарной избыточности.
Затраты пространственного ресурса конструктивными решениями, заимствованными из кораблестроения и строительства, не считались в указанных областях отрицательным эффектом (ухудшением), поскольку соответствовали полезной функции «перекрытие пространства», или не считались существенным ухудшением (как, например, большой вертикальный размер мостовой фермы). Для самолета же такая архитектура приводила к снижению скорости. Однако в противоречии «вес (подъемная сила) – скорость» сторона «вес» на начальном этапе развития самолета являлась более важной, поскольку определяла его работоспособность. Соответственно на этом этапе развития не прижились любые предложения по повышению динамичности конструкции (в частности, убирающееся шасси, изменяемая геометрия крыльев – такие идеи пытались внедрять очень рано), а также упомянутые выше попытки автоматизировать управление, которые приводили к уменьшению отношения аэродинамической подъемной силы к весу самолета. Также не получили распространения конструкции фюзеляжа в виде «несущего монокока» и обшивки крыла из фанеры. Хотя такие решения снижали аэродинамическое сопротивление, однако обладали повышенным весом, что не обеспечивало уверенный полет при ограниченной мощности двигателя. Для того чтобы вес самолета перестал быть основным фактором, определяющим его работоспособность, должен быть пройден определенный порог энерговооруженности (отношения мощности силовой установки к взлетному весу). Из зависимости, приведенной на рис. 8, видно, что эта пороговая величина для транспортных (т.е. не маневренных) самолетов составляла около 0,10-0,15 л.с./кг, а для боевых маневренных самолетов (истребителей) - около 0,25 л.с./кг.
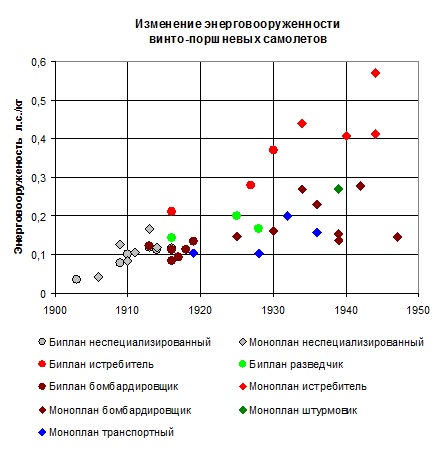
Рисунок 8 – Изменение энерговооруженности (отношения мощности силовой установки к взлетному весу, л.с./кг) винто-поршневых самолетов
Конструктивные решения, примененные для обеспечения прочности самолета при минимуме массы, как раз и породили бипланную схему, хотя первоначально самолет иначе как моноплан никто не представлял (см., например, рис. 2 и 3). Для повышения подъемной силы при имеющейся мощности требовалось увеличивать размеры крыла, в первую очередь – размах. Однако схема крепления крыла моноплана за счет мачт с растяжками не позволяла обеспечивать требуемую прочность при больших размерах крыла. Растяжки, имеющие малый угол наклона к плоскости крыла, работают плохо, а высота мачт не может увеличиваться безгранично. Кроме того, система растяжек плохо обеспечивала жесткость крыла на кручение.
Бипланная схема впервые была разработана для планеров как развитие схемы коробчатого воздушного змея. Впрочем, идея заменить одно крыло двумя крыльями с целью повысить суммарную подъемную силу является самоочевидной. Вообще закономерность «моно – би – поли» всегда срабатывает в том случае, когда увеличение параметров единичного элемента невозможно из-за запрета (ограничения) или обострения противоречия. Эффективный размах крыла, эквивалентного бипланной «коробке», превышает эффективный размах монопланного крыла, имеющего тот же геометрический размах, всего на 10-15%. Однако пара крыльев, соединенных стойками и Х-образными растяжками, образовывала достаточно прочную и жесткую конструкцию, которая позволяла получать геометрический размах крыла, заметно превышающий размах крыла моноплана, возможный по условиям прочности и жесткости. Кроме того бипланные крылья меньше ломались при авариях и быстрее восстанавливались по сравнению с монопланным крылом (в частности, настройка системы оттяжек монопланного крыла была весьма не простым делом). То есть кроме необходимости увеличить подъемную силу здесь сработал также дополнительный полезный системный эффект, обеспечивший повышение надежности функционирования.
Рост мощности авиационных двигателей, которая к 1913 году достигла 100-160 л.с., и соответствующее увеличение энерговооруженности самолетов позволило для бипланов отказаться от технических решений, «выжимающих» подъемную силу из ограниченного энергетического ресурса, и использовать элементы архитектуры монопланов, обеспечивающих снижение сопротивления: центральную конструкцию в виде объемного фюзеляжа, тянущий винт и органы управления в хвостовом оперении. То есть позволило осуществить гибридизацию конкурирующих конструктивных типов самолета. Впервые весь комплекс этих технических решений был реализован в 1913 году на самолете «Скаут», который сумел объединить преимущества монопланов по скорости (148 км/ч) и скороподъемности с хорошей маневренностью, характерной для бипланов и обусловленной заметным превышением подъемной силы над весом самолета. Такая схема быстро получила распространение (рис. 9). В результате, если в 1910 - 1911 годах (в конце подэтапа 1.1) на долю бипланов приходилось около 1/3 от общего числа самолетов (остальное составляли монопланы), то к 1914 году (в конце подэтапа 1.2 и первого этапа в целом) картина стала полностью противоположной.

Рисунок 9 – Самолет-биплан «Бристоль – Скаут»
К концу подэтапа 1.1 управляющие элементы (элероны, рули) заняли место за неподвижными плоскостями (крыльями, стабилизаторами) или выполнялись частью этих плоскостей, что обеспечивало увеличение управляющей силы при той же площади управляющего элемента (за счет системного эффекта: при перекладке управляющего элемента изменение давления распространяется и на часть неподвижной плоскости).
5.3 Подэтап 1.2
В ходе подэтапа 1.2 началось первое деление самолетов по различным функционально-параметрическим нишам. До этого самолет использовался для демонстрационных полетов и спорта, то есть был достаточно узкоспециализированным средством развлечения.
В свете этого факта суждение, что все ТС рождаются универсальными, выглядит сомнительным. Любой универсализм предполагает определенную многофункциональность, для чего ТС должна иметь соответствующую широту возможностей. А у вновь возникшего технического средства таковой широты не наблюдается: у него хватает возможностей только на преодоление порога работоспособности. Отмеченное впечатление об исходной универсальности ТС скорее всего порождается многофункциональностью самого человека. Самолет только и способен, что поднять в воздух одного человека с минимальным дополнительным грузом, но зато человек может взять с собой самые разные вещи, например, письма или бинокль или пистолет с гранатой, что и производит ошибочное впечатление о различных возможностях самолета.
Для практического применения самолет должен был превзойти своих конкурентов: автомобили по скорости и дирижабли по грузоподъемности и дальности полета. Но, как было отмечено выше, скорость полета находится в отношении противоречия с грузоподъемность и дальностью. Именно необходимость разрешения этих противоречий привело к возникновению двух больших специализированных подклассов самолетов: скоростные самолеты ограниченного размера и веса и большие транспортные самолеты с меньшей скоростью полета.
Подкласс скоростных самолетов развивался как продолжение первых спортивных монопланов. Можно отметить, что за счет реализации передовых технических решений (монококовый фюзеляж, крыло уменьшенной площади, обтяжка профиля крыла с двух сторон с последующей лакировкой и полировкой полотна) и увеличения мощности двигателя (до 160 л.с.) в 1913 году, например, гоночный моноплан «Депердюссон» (рис. 10) установил рекорд скорости (200 км/ч), который не был побит до 1917 года. Однако этот самолет не обладал достаточной маневренностью, которая требовалась для практического использования, (из-за малого запаса по подъемной силе, т.е. из-за небольшой величины отношения подъемной силы к весу) и оказался слишком дорогим в производстве. Поэтому примененные технические решения, характерные для рекордного самолета, дальнейшего распространения на подэтапе 1.2 не получили.
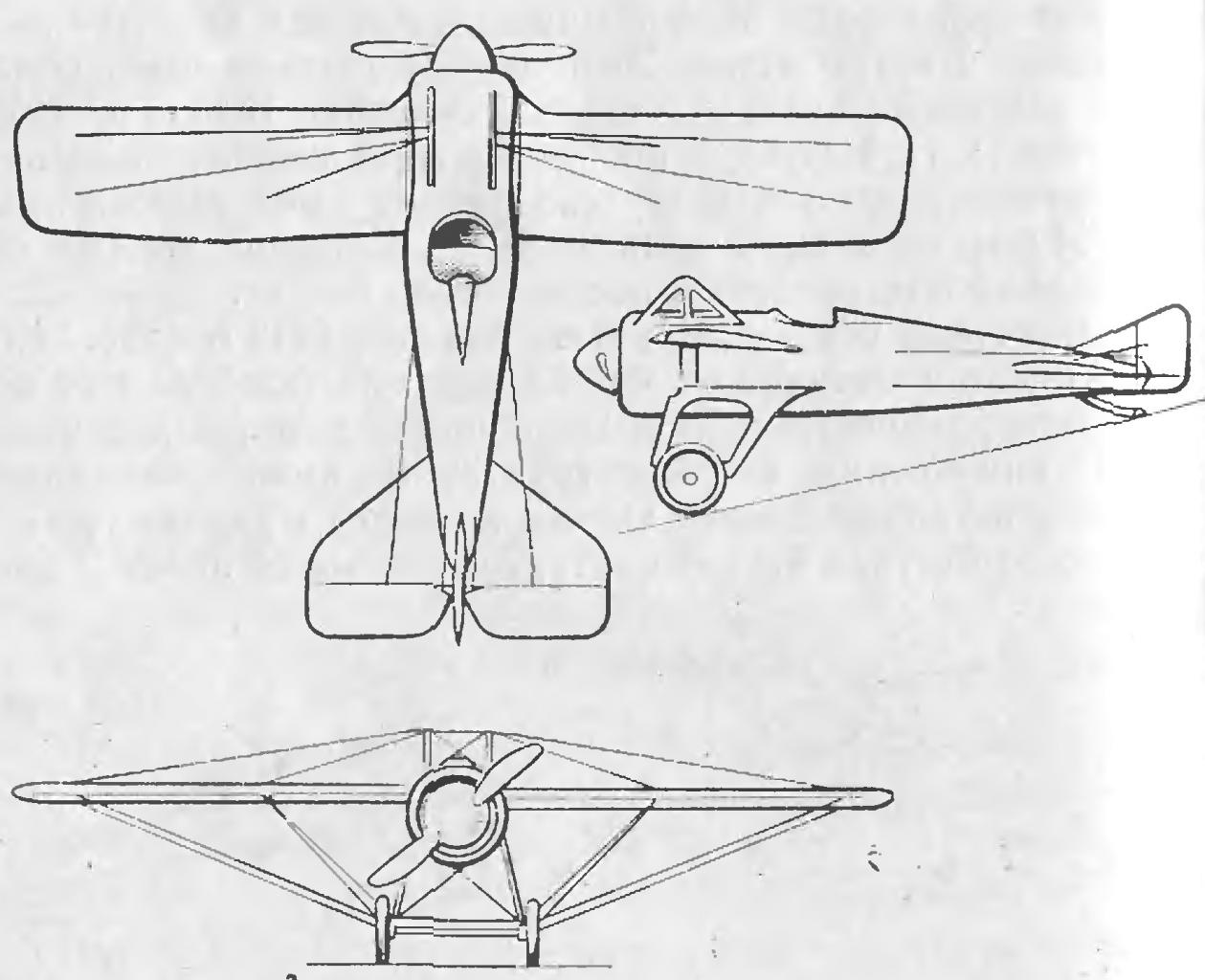
Рисунок 10 – Гоночный моноплан «Депердюссон» (1913г.)
Подкласс грузоподъемных (транспортных) самолетов развивался на основе бипланов. Особых успехов удалось добиться после установки на самолет нескольких двигателей. Сначала попытки установить два двигателя выполнялись с целью обеспечения надежности полета (дублирование). Это также является проявлением закономерности «моно – би – поли», поскольку в одном агрегате (моторе) не удавалось обеспечить требуемого уровня надежности работы. Затем установку нескольких двигателей на один самолет стали использовать для увеличения суммарной мощности силовой установки (при существующих ограничениях на величину мощности одного двигателя) и повышения взлетного веса самолета при сохранении требуемого уровня энерговооруженности. Практическая проверка этой схемы на первом в мире 4-х моторном самолете «Русский витязь» (1913г., конструкция И.И.Сикорского, взлетный вес 4200 кг, полезная нагрузка 700 кг) подтвердила возможность сохранения прямолинейного полета при выходе из строя одного из двигателей, что сделало фактом рождение подкласса тяжелых многомоторных самолетов. Дальнейшим развитием этой схемы явился самолет «Илья Муромец» с взлетным весом 5100 кг и полезной нагрузкой 1300 кг, созданный в том же году (рис. 11).

Рисунок 11 – Самолет «Илья Муромец»
Расширение технических возможностей (в первую очередь – энерговооруженности) самолета на подэтапе 1.2 привело к появлению еще одного подкласса – гидросамолетов. Попытки создания самолетов, использующих поверхность воды для взлета и посадки, делались и в начале первого этапа. Эти попытки базировались на ошибочном представлении, что взлет с воды потребует меньше мощности, чем взлет с суши, и окончились неудачей. В конце первого этапа развития обращение к гидроавиации было обусловлено желанием обеспечить безопасность полетов над водными пространствами. Кроме того, гидроавиация заинтересовала военных. Гидросамолеты создавались по двум направлениям: установка на поплавки сухопутных самолетов (удовлетворительную мореходность при этом имели только большие самолеты) и создание специальных самолетов типа «летающая лодка» (повышенная мореходность обеспечивалась за счет глиссирующего плавающего фюзеляжа).
Создание гидросамолетов фактически соответствовало освоению дополнительного природного ресурса для обеспечения взлета и посадки, что в известной степени должно было смягчить отрицательный эффект, сопутствующий отмеченному выше противоречию, присущему принципу действия ТС «самолет».
5.4 Повышение относительной эффективности на первом этапе
В течение первого этапа развития самолета наряду с ростом функциональных параметров увеличивалась и относительная эффективность (которая при проецировании на внутреннее функционирование ТС имеет вид «повышения идеальности»). В техническом плане относительная эффективность выражалась в росте коэффициента энергетического качества Кэ = (G ∙ V)/(270 ∙ N),
где G – взлетный вес самолета (кг);
V – максимальная скорость полета (км/ч);
N – мощность силовой установки (л.с.).
Изменение величины Кэ показано на рис. 12. Его рост обусловлен в первую очередь увеличением аэродинамического качества, изменение которого показано на рис. 13. Из зависимости, приведенной на этом рисунке видно, что в течение первого этапа развития аэродинамическое качество самолета выросло практически в 2 раза. Особенно интенсивно оно увеличивалось на подэтапе 1.1, что было обусловлено необходимостью «выжимания» величины подъемной силы из весьма ограниченных энергетических ресурсов для обеспечения работоспособности и уверенного полета самолета. Повышение аэродинамического качества на этом подэтапе обеспечивалось главным образом за счет совершенствования крыла. Не меньшее влияние оказал и рост удельной мощности авиационных двигателей (рис. 7). Таким образом, повышение относительной эффективности самолета обеспечивалось за счет роста относительной эффективности основных подсистем: планера и силовой установки.
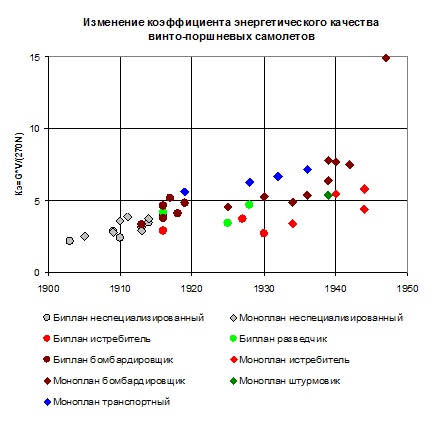
Рисунок 12 – Изменение коэффициента энергетического качества
Кэ = (G ∙ V)/(270 ∙ N) винто-поршневых самолетов

Рисунок 13 – Изменение аэродинамического качества нереактивных самолетов
6 Некоторые предварительные выводы
На основании изложенного выше, включая рассмотрение первого этапа развития самолета, можно сделать следующие предварительные обобщающие выводы.
Представляя техническую систему как единство функции и принципа действия, следует выделить основные подсистемы, изменение которых характеризует развитие этой ТС. Необходимо сформулировать перечень условий (имеющих преимущественно физическое содержание), выполнение которых обеспечивает полноценное функционирование системы. Целесообразно также выявить главные противоречия данной ТС, обусловленные её функцией и принципом действия.
Для наиболее важных условий, определяющих работоспособность системы, следует выявить пороговые значения (параметрические пороги), преодоление которых необходимо для уверенного функционирования ТС. Необходимо также выявить минимально необходимый (пороговый) уровень динамичности соответствующих подсистем. Преодоление указанных порогов характеризует завершение фазы создания ТС и позволяет рассматривать дальнейшие изменения как развитие.
Исходя из функции и принципа действия системы, следует определить основной фактор (факторы) противодействия среды (окружения), который необходимо преодолевать для обеспечения функционирования путем затраты некоторого (основного) ресурса. Необходимо также выявить соотношение между уровнями этого фактора противодействия и затрат основного ресурса, которое также может иметь пороговые значения, определяющие возможность реализации тех или иных технических решений в процессе развития ТС. (Для самолета указанным понятиям соответствуют: сила гравитационного притяжения (взлетный вес), мощность силовой установки и энерговооруженность.)
На этапе создания (становления) и начальных фазах развития не могут реализовываться те технические решения (соответствующие, в частности, ЗРТС), которые препятствуют выполнению условий работоспособности ТС или заметно уменьшают возможности их выполнения. Иначе: ухудшение обеспечения работоспособности на этих этапах является весьма существенным отрицательным эффектом, то есть нежелательным эффектом, и блокирует любое изменение в системе, приводящее к данному НЭ.
На этапе создания (становления) и начальных фазах развития ТС достаточно часто реализуются технические решения, связанные с увеличением числа используемых аналогичных элементов с объединением их в некую структуру, что соответствует ЗРТС «моно – би – поли». Эта закономерность срабатывает в тех случаях, когда невозможно изменить требуемым образом параметры единичного элемента из-за запретов (ограничений), недостатка ресурса или обострения соответствующего противоречия. Одним из проявлений этой закономерности можно считать, в частности, дублирование элементов для обеспечения надежности функционирования. Из реализованных в соответствии с ней технических решений наиболее долгоживущими (перспективными) являются те, в которых кроме достижения требуемой величины параметра проявляются дополнительно полезные системные эффекты.
Противоречия между параметрами, характеризующими функционирование ТС, разрешаются в первую очередь за счет создания различных конкурирующих конструктивных типов, каждый из которых обладает явным преимуществом по одному из параметров (или по одной из совокупностей параметров). В дальнейшем, по мере возрастания возможностей ТС и соответствующего расширения границ функционально-параметрической ниши форма разрешения этих противоречий приобретает вид создания специализированных подклассов технической системы. Развитие технического средства в этих подклассах может начинаться, опираясь на соответствующие конструктивные типы, получившиеся по итогам начальной фазы создания уверенно функционирующей ТС.
Если для обеспечения функционирования ТС в соответствии с её принципом действия требуются затраты некоторых видов природного ресурса, то по мере роста возможностей системы происходит освоение всех этих видов ресурса. При этом для существенно различающихся видов ресурса могут создаваться соответствующие приспособленные (специализированные) конструктивные типы ТС.
При создании конкурирующих между собой различных конструктивных типов ТС между ними при возникновении соответствующих условий может происходить гибридизация с заимствованием технических решений (как отдельных, так и целых групп).
Одновременно с ростом функциональных характеристик ТС в ходе её развития увеличивается и относительная эффективность системы, что на начальных этапах является необходимым условием обеспечения работоспособности при ограниченности используемых ресурсов. Рост относительной эффективности обеспечивается в первую очередь за счет основных (ключевых) подсистем, обеспечивающих реализацию функции и принципа действия системы.
Обеспечение надежности и безопасности функционирования является весьма важным фактором развития, который начинает активно действовать после обеспечения уверенной работоспособности ТС.