IV конференция "ТРИЗ. Практика применения методических инструментов"
Система навигации беспилотных летательных аппаратов с помощью видео
Купервассер Олег, Рубинштейн Александр ООО «Транзист Видео», «Транзас» olegkup@yahoo.com
Аннотация
Существующие ныне автономные системы навигации для летательных аппаратов – это инерциальные навигационные системы. Они имеют нарастающую во времени ошибку и высокую стоимость при высокой точности. Эти проблемы решаются путем применения дополнительных спутниковых систем навигации. Это повышает точность навигационных систем, но приводит к потере их автономности и помехоустойчивости. Таким образом, мы имеем типичное противоречие, описываемое ТРИЗ: методы, которые приводят к улучшению точности навигации, одновременно приводят к потере системой автономности и помехоустойчивости. Это противоречие разрешается введением видеонавигации. При этом получается изображение местности камерой, которое затем анализируется бортовым компьютером и, исходя из этого анализа, находится координаты и ориентация летательного аппарата. Эти методы аналогичны методам, используем человеком для ориентации в пространстве. Для создания системы видеонавигации и организуется Сколковский проект, реализуемой фирмой-участницей ООО «Транзист Видео». Планируется разработать три модуля для видеонавигации, которые подразделяются по полноте использования дополнительной информации о местности (кроме текущей видеосъемки), полученной заранее и хранящейся в памяти.
1) Модуль, работающий по текущим снимкам без привлечения дополнительной информации. В первом кадре видеопотока она находит характерные точки и далее отслеживает их перемещение в кадре. По характеру перемещения программа определяет, как изменяется положение и ориентация самой камеры. Программа находит в каждом кадре сотни и тысячи характерных точек, что обеспечивает высокую точность навигации. 2) Mодуль точной привязки по рельефу по стереоэффекту, возникающему при движении камеры, восстанавливается рельеф, он сравнивается с заложенными в память данными, в случае «узнавания» определяются точные координаты и ориентация 3) Mодуль точной привязки по эталонным фотографиям кадры видео сравниваются с заложенными в память изображениями участков маршрута, в случае «узнавания» определяются точные координаты и ориентация

В настоящее время основу навигационных систем беспилотных летательных аппаратов составляют приёмники глобальных систем спутниковой навигации (ГССН), комплексированные с блоком инерциальных датчиков пространственной ориентации. Такая система обеспечивает достаточно точное определение местоположения БЛА и параметров его движения (до 15 м СКО) при наличие незатруднённого приёма сигналов ГССН. При комплексировании со спутниковой навигацией возможно применение низкоточных недорогих инерциальных систем, оснащённых микромеханическими датчиками движения (акселерометрами и гироскопами). Стоимость такой системы составляет от 5 до 15 тыс. долларов США в зависимости от точности датчиков. Следует отметить, что инерциальная система такого ценового диапазона не в состоянии осуществлять автономное счисление пройденного пути ввиду высоких скоростей дрейфа гироскопических датчиков. Лучшие образцы способны поддерживать точность в течении нескольких минут (не более 10) отсутствия сигнала СНС на уровне 100-150 м. При этом как правило требуется поддержание режима прямолинейного движения без ускорений.
Таким образом, присутствие сигналов ГССН является в настоящее время необходимым условием выполнения беспилотными летательными аппаратами поставленных задач. Отсутствие или намеренное подавление СНС приводит к невозможности точно определить собственные координаты и как следствие, выполнить полёт по заданному маршруту. В случае же использования на БЛА инерциальной системы сверхнизкой точности (особенно на БЛА ближнего действия) отсутствие корректирующих сигналов от ГССН может привести к «развалу» инерциальной системы и аварии БЛА. Поэтому подавление ГССН рассматривается в качестве основного метода борьбы с БЛА.
Применение высокоточных инерциальных навигационных систем (ИНС) также полностью не решает проблему по следующим причинам:
- такие системы дороги (от 30-50 тыс. долларов)
- масса инерциальной системы «средней точности» на лазерных или волоконно-оптических гироскопах составляет от 8 кг, что делает проблематичным их использование на БЛА малой и даже средней дальностей
- принципиальным ограничением ИНС является рост ошибки определения координат с течением времени автономной работы. Точность автономного счисления координат для современных ИНС составляет порядка 1 морской мили за час полёта (для систем высокой точности), что не позволяет обеспечить высокоточное определение координат целей.
Таким образом, мы имеем типичное противоречие, описываемое ТРИЗ: методы, которые приводят к улучшению точности навигации, одновременно приводят к потере системой автономности и помехоустойчивости. Это противоречие разрешается путем внедрения видеонавигации.
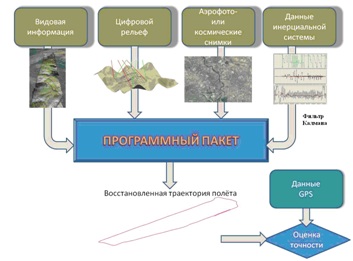
Производители беспилотных систем в США и Израиле проводят исследования и разработки, направленные на обеспечение автономности применения БЛА в условиях отсутствия сигналов спутниковой навигации на основе альтернативных источников данных. К таким данным относятся прежде всего видовая информация, поступающая с бортовых фото и видеокамер дневного и инфракрасного диапазонов, синтезированное изображение радара, данные цифрового рельефа местности, космические снимки, а также так называемые «сигналы природного происхождения»: вектору силы тяжести, магнитному полю Земли, положению светил. Развитие и миниатюризация компьютерных систем, систем сбора и обработки видовой информации сделали возможной реализацию подобной системы в составе аппаратных средств навигации и управления беспилотного летательного аппарата.
Судя по анализу публикаций, теоретические исследования начали проводить с 2003 года [1,2]. В настоящее время началась экспериментальная реализация разработок на БЛА различных типах, как самолётной схемы, так и вертикального взлёта. В частности, компания Rockwell-Collins, производящая аппаратуру навигации и управления полётом для БЛА различных типов, объявила о завершении разработки Vision Augmented Inertial Navigation System (VAINS) [3], в которой обеспечивается коррекция инерциальной системы по скорости и координатам от видеокамеры в отсутствие сигналов СНС.
Упомянутые разработки проводятся университетскими и промышленными исследовательскими центрами по заданиям DARPA (Defense Advanced Research Projects Agency - http://www.darpa.mil/ ), AIR FORCE INSTITUTE OF TECHNOLOGY, The Charles Stark Draper Laboratory, Inc(т.н. «Дрейперовская лаборатория», США) [6] . Новая версия известных ракет Томагавк планируется оснастить такой системой навигации к середине 2012 года (http://www.ssci.com ). Подробнее смотри Приложение В. Очевидно, что такая технология относится к числу критических (http://www.ncbi.nlm.nih.gov/pubmed/20820078).
В Израиле подобные разработки проведены по заказам компаний Rafael Advanced Defense Systems Ltd (http://www.rafael.co.il ), занимающейся в основном разработками систем управляемого высокоточного оружия при участии автора проекта
(http://arxiv.org/ftp/arxiv/papers/1107/1107.1470.pdf),(http://arxiv.org/ftp/arxiv/papers/1106/1106.6341.pdf) , и Elbit Systems Ltd. (http://www.elbitsystems.com/ ) известной не только в качестве ведущего производителя беспилотных летательных аппаратов, но также проводящей разработки наземных роботизированных комплексов военного назначения [5]. Следует отметить, что недавно проведенные реальные летные испытания подтвердили применимость их методов для целей практической видеонавигации [7].
Подобные разработки проводятся и в российской компании Транзас при участии автора проекта: ( http://arxiv.org/PS_cache/arxiv/pdf/1107/1107.0399v2.pdf )
Удачное приложение этих методов было достигнуто американо-российской компанией Skillgent
Очевидно, что такая технология относится к числу критических, определяющих эффективность и саму применимость беспилотных средств в условиях затруднённого приёма данных СНС. Важно отметить, что технология применима и для пилотируемых средств, а также для наземных роботизированных транспортных средств, работающих внутри помещений и для наведения высокоточного оружия.
В настоящее время разработаны математические основы определения местоположения летательного аппарата по видовой информации, проведено компьютерное моделирование и обоснованы требования к аппаратным средствам системы комплексированной навигации для БЛА средней и малой дальности. В основу принципа положены 3 базовых способа
1.Счисление пройденного пути на основе анализа потока видеоданных, поступающего с оптико-электронных приборов наблюдения. В каждом кадре автоматически находятся десятки характерных точек. Анализ их перемещения от кадра к кадру даёт информацию о движении объекта. Большое количество таких точек гарантирует точность определения перемещения, курса и углов ориентации. Основным ограничением метода является возможность только относительного определения координат и ориентации, что может привести к росту ошибки навигации со временем. Другим его недостатком является неполнота – все расстояния находятся с точностью до произвольной постоянной. Тажке могут быть причны, приводящие к невозможностью найти соответствующие пары точек на снимках: недостаточная освещенность, невозможность использования в случае облачности, невозможность использования над гладкой поверхностью без характерных особых точек (плоская, равномерно освещеная водная поверхность «без ряби» и волн; однородная и ровная песчаная пустыня без растительности)
2.Использование данных рельефа позволяет частично компенсировать недостатки первого метода. Используя перекрытие потока фото- видео- данных, восстанавливается рельеф местности. Сравнение с цифровой моделью рельефа местности позволяет определить местоположение летательного аппарата. В отличие от Метода 1 при использовании сканирующего лазерного высотомера возможно определение местоположения в отсутствие дневного освещения, однако, аналогично методу 1 рассматриваемый подход не работает над водной или песчаной поверхностью и даёт существенную ошибку в отсутствие явно выраженного рельефа. Основное преимущество перед предыдущим методом – возможность найти не только относительное, но и абсолютное положение камеры, поскольку знание карты привязывает камеру к конкретным точкам на местности с известными абсолютными координатами. Это ведет к тому, что ошибка навигации не растет со временем. Основной недостаток метода – чувствительность к слишком большим ошибкам исходных координат камеры, полученных от инерционным навигационных приборов, которые метод должен затем уточнять.
3.Использование цифровых снимков местности так же позволяет определить координаты местоположения и ориентацию путём сравнения текущей видовой информации. Этот метод обеспечивает высокую точность определения абсолютных координат даже при осутствии рельефа. Он также позволяет найти абсолютное положение камеры, даже когда ее примерные координаты вообще неизвестны. Это достигается путем сканирования всей базы данных со снимкам местности и сравнения их с текущим снимком. Кроме того, имея «привязанный» снимок можно с высокой точностью определять координаты наземных объектов, обнаруженных оптико-электронной аппаратурой.
Важно отметить, что разработка математических основ всех указанных методов уже проведена, и их реализуемость математически обоснована и доказана. Об этом свидетельствуют и ссылки мировой научной прессы. Предварительные оценки и компьютерное моделирование показывают, что применение методов определения координат объекта по видовой информации и цифровым геоданным позволяет определять координаты местоположения с ошибкой не более 30 м независимо от времени. Наилучший результат даёт комплексное использование всех методов в сочетании с «традиционными» системами навигации, например, с инерциальной навигационной системой.
Результат разработки
Предполагается, что разработка продлится в 2 этапа в течение 24 месяцев.
На 1 этапе (12 месяцев) осуществляется программная реализация алгоритмов в виде пакета прикладных программ персонального компьютера для обработки входных данных с целью восстановления траектории полёта. Для подтверждения полученных результатов проводятся натурные эксперименты с применением имеющихся полётных данных и видовой информации, и на заключительном этапе полёты по специальной программе с установкой экспериментального оборудования.
- Пакет программного обеспечения для персонального компьютера, с интуитивно-понятным пользовательским интерфейсом, реализующий методы «видовой навигации» по данным, вводимым пользователем в согласованном формате.
- Документированный код программы (в пакете MatLab и С++) на электронном носителе
-
Технический отчёт, содержащий:
- Детальное описание алгоритмов.
- Описание экспериментального оборудования и условий проведения эксперимента.
- Результаты натурного эксперимента и оценку результатов.
- Промежуточный отчёт предоставляется по результатам 6 месяцев работы.
На 2 этапе (12 месяцев) осуществляется аппаратная реализация методов в виде специализированного вычислительного устройства, а также дальнейшее совершенствование и развитие методов, разработанных на предыдущем этапе.
ЛИТЕРАТУРА
- Tightly-Coupled Image-Aided Inertial Navigation System via a Kalman Filter DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY, AIR FORCE INSTITUTE OF TECHNOLOGY
- Vision-Aided Inertial Navigation for Flight Control. AIAA Guidance, Navigation, and Control Conference and Exhibit 15 - 18 August 2005, San Francisco, California
- http://www.rockwellcollins.com/athena/services/
- Integrated Vision-Based Navigation System for Autonomous Vehicles in GPS-denied Environments (Autonomous Weapons Summit and GNC Challenges for Miniature Autonomous Systems Workshop, October 25-27, 2010)
- Error Analysis for a Navigation Algorithm based on Optical-Flow and a Digital Terrain Map - O. Kupervasser, R. Lerner, E.Rivlin
- Visual Navigation Aid for Planetary UAV Risk Reduction — The Charles Stark Draper Laboratory, Inc. — USA Intelligent robots and computer vision XXV 9-11 September, 2007, Boston, Massachusetts, USA
- Lerner R, Rivlin E. Direct Method for Video Based Navigation Using a Digital Terrain Map IEEE Trans Pattern Anal Mach Intell. 2010 Aug 31,
http://www.ncbi.nlm.nih.gov/pubmed/20820078